在 OpenPCDet 中,每个模型的推理结果通常是一个包含多个键值对的字典,其中包含与 3D 检测任务相关的信息。不同模型的输出结构可能略有不同,但一般来说,模型输出通常包含以下几个关键字段:
以下给一段output/kitti_models/pointrcnn/default/eval/eval_with_train/epoch_80/val/result.pkl中选取某一帧的结果示例,提取为json文件便于阅读:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
| {
"pointrcnn": [
{
"name": [
"Car",
"Pedestrian",
"Pedestrian",
],
"truncated": [
0.0,
0.0,
0.0,
],
"occluded": [
0.0,
0.0,
0.0,
],
"alpha": [
-4.0102105140686035,
-1.6028798818588257,
-4.731999397277832,
],
"bbox": [
[
0.0,
196.87057495117188,
410.6382141113281,
373.0
],
[
688.0215454101562,
172.8148193359375,
709.7300415039062,
224.52003479003906
],
[
667.0341186523438,
172.51962280273438,
687.4990844726562,
223.23146057128906
],
],
"dimensions": [
[
4.10535192489624,
1.4689395427703857,
1.6220554113388062
],
[
0.9827990531921387,
1.7112400531768799,
0.6871805191040039
],
[
0.5967018008232117,
1.6898497343063354,
0.67041015625
],
],
"location": [
[
-2.7540218830108643,
1.6045180559158325,
4.157565593719482
],
[
3.2612111568450928,
1.4242191314697266,
24.295761108398438
],
[
2.5298221111297607,
1.3910222053527832,
24.260332107543945
],
],
"rotation_y": [
-4.574054718017578,
-1.476109504699707,
-4.6344404220581055,
],
"score": [
0.9997606873512268,
0.9978153705596924,
0.9920910596847534,
],
"boxes_lidar": [
[
4.406521797180176,
2.786322832107544,
-0.915142297744751,
4.10535192489624,
1.6220554113388062,
1.4689395427703857,
3.003258228302002
],
[
24.574119567871094,
-3.132066488265991,
-0.7385169863700867,
0.9827990531921387,
0.6871805191040039,
1.7112400531768799,
-0.09468691051006317
],
[
24.53524398803711,
-2.4012603759765625,
-0.7080038189888,
0.5967018008232117,
0.67041015625,
1.6898497343063354,
3.0636441707611084
],
],
}
],
}
|
内容解读
name
含义:检测到的物体类别。
示例:["Car", "Pedestrian", "Pedestrian", ...]
说明:
- “Car” 表示检测到的物体是车辆。
- “Pedestrian” 表示检测到的物体是行人。
truncated
含义:物体被截断的程度。
示例:[0.0, 0.0, 0.0, ...]
说明:
取值范围为 [0, 1],0.0 表示物体未被截断,1.0 表示物体被完全截断。
occluded
含义:物体被遮挡的程度。
示例:[0.0, 0.0, 0.0, ...]
说明:
取值范围为 [0, 2],0.0 表示物体未被遮挡,1.0 表示物体被部分遮挡,2.0 表示物体被完全遮挡。
alpha
含义:物体的视角角度(观察角度)。
示例:[-4.0102105140686035, -1.6028798818588257, ...]
说明:
- 表示物体相对于相机的视角角度(以弧度为单位)。
- 取值范围为
[-π, π]。
bbox
含义:物体在图像中的 2D 边界框。
示例:[[0.0, 196.87057495117188, 410.6382141113281, 373.0], ...]
说明:
- 每个边界框的格式为
[x_min, y_min, x_max, y_max],表示边界框的左上角和右下角坐标。
- 坐标单位为像素。
dimensions
含义:物体的 3D 尺寸(长、宽、高)。
示例:[[4.10535192489624, 1.4689395427703857, 1.6220554113388062], ...]
说明:
每个物体的尺寸格式为 [length, width, height],单位为米。
location
含义:物体在相机坐标系中的 3D 位置(中心点坐标)。
示例:[[-2.7540218830108643, 1.6045180559158325, 4.157565593719482], ...]
说明:
- 每个物体的位置格式为
[x, y, z],单位为米。
- 坐标系为相机坐标系。
rotation_y
含义:物体绕相机坐标系的 y 轴的旋转角度(偏航角)。
示例:[-4.574054718017578, -1.476109504699707, ...]
说明:
单位为弧度,取值范围为[-π, π]。
score
含义:检测结果的置信度分数。
示例:[0.9997606873512268, 0.9978153705596924, ...]
说明:
取值范围为 [0, 1],1.0 表示检测结果非常可靠。
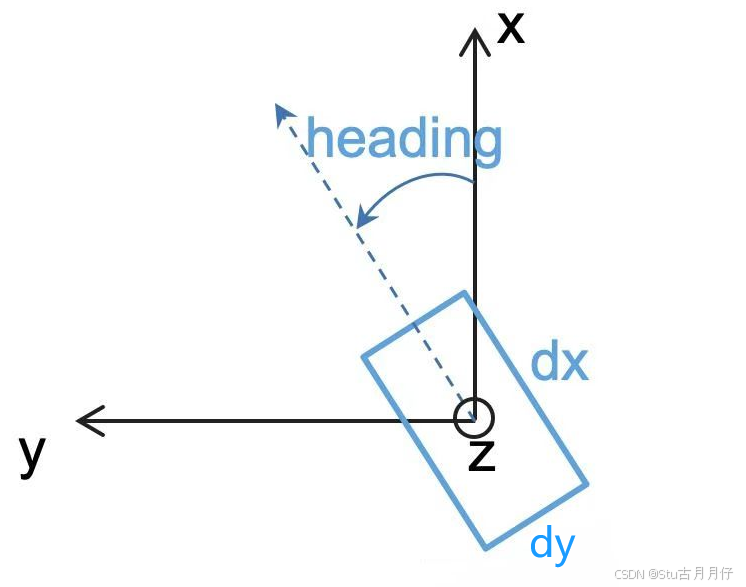
boxes_lidar
含义:物体在激光雷达坐标系中的 3D 边界框。
示例:[[4.406521797180176, 2.786322832107544, -0.915142297744751, 4.10535192489624, 1.6220554113388062, 1.4689395427703857, 3.003258228302002], ...]
说明:
- 每个边界框的格式为
[x, y, z, length, width, height, ry],单位为米。
(x, y, z) 表示边界框的中心点坐标。(length, width, height) 表示边界框的尺寸。ry 表示边界框绕激光雷达坐标系的 z 轴的旋转角度(偏航角),单位为弧度。
坐标系说明
相机坐标系:
- x 轴:向右(图像右侧)。
- y 轴:向下(图像底部)。
- z 轴:向前(相机光轴方向)。
激光雷达坐标系:
- x 轴:向前(车辆前进方向)。
- y 轴:向左(车辆左侧)。
- z 轴:向上(垂直于地面)。
数据对应关系
location 和 boxes_lidar:
location 是基于相机坐标系的,而 boxes_lidar 是基于激光雷达坐标系的。
如果需要将 location 转换到激光雷达坐标系,可以使用 KITTI 提供的外参矩阵。
bbox 和 boxes_lidar:
bbox 是物体在图像中的 2D 边界框,而 boxes_lidar 是物体在激光雷达坐标系中的 3D 边界框。
提取json文件的代码
有朋友留言问我是怎么把pkl文件提取出来的,附下面的代码供参考:
使用时记得替换路径
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
| import pickle
import json
import numpy as np
import os
target_frame_id = "000015"
result_paths = [
'/home/tdhu/OpenPCDet/output/kitti_models/PartA2_free/default/eval/eval_with_train/epoch_80/val/result.pkl',
'/home/tdhu/OpenPCDet/output/kitti_models/pointpillar/default/eval/eval_with_train/epoch_80/val/result.pkl',
'/home/tdhu/OpenPCDet/output/kitti_models/pointrcnn/default/eval/eval_with_train/epoch_80/val/result.pkl',
'/home/tdhu/OpenPCDet/output/kitti_models/pointrcnn_iou/default/eval/eval_with_train/epoch_80/val/result.pkl',
'/home/tdhu/OpenPCDet/output/kitti_models/pv_rcnn/default/eval/eval_with_train/epoch_80/val/result.pkl',
'/home/tdhu/OpenPCDet/output/kitti_models/second/default/eval/eval_with_train/epoch_80/val/result.pkl',
'/home/tdhu/OpenPCDet/output/kitti_models/second_iou/default/eval/eval_with_train/epoch_80/val/result.pkl'
]
def convert_to_serializable(obj):
if isinstance(obj, np.ndarray):
return obj.tolist()
elif isinstance(obj, (np.float32, np.float64)):
return float(obj)
elif isinstance(obj, (np.int32, np.int64)):
return int(obj)
return obj
all_model_results = {}
for result_path in result_paths:
path_parts = result_path.split('/')
if "kitti_models" in path_parts:
model_index = path_parts.index("kitti_models") + 1
model_name = path_parts[model_index]
else:
model_name = "Unknown"
try:
with open(result_path, "rb") as f:
result_data = pickle.load(f)
if isinstance(result_data, list):
matched_frames = [frame for frame in result_data if frame.get("frame_id") == target_frame_id]
if matched_frames:
print(f"模型 {model_name} 找到 {len(matched_frames)} 个匹配 frame_id = {target_frame_id} 的数据")
all_model_results[model_name] = matched_frames
else:
print(f"模型 {model_name} 未找到 frame_id = {target_frame_id} 的数据")
else:
print(f"模型 {model_name} 数据格式异常: {type(result_data)}")
except Exception as e:
print(f"加载模型 {model_name} 的数据时发生错误: {e}")
if all_model_results:
output_json_path = "output.json"
with open(output_json_path, "w", encoding="utf-8") as f:
json.dump(all_model_results, f, indent=4, ensure_ascii=False, default=convert_to_serializable)
print(f"所有模型推理的 JSON 结果已保存为 {output_json_path}")
else:
print("未找到任何匹配的 frame_id 数据")
|