摘要:本文是对Contextual AI团队2026年4月最新预印本论文《Reflective Context Learning》的深度解读。该论文首次提出Context Learning与传统参数空间优化在数学本质上同构的核心论点,统一了prompt工程、上下文学习、工具设计等分散领域的研究视角,系统性分析了上下文空间优化面临的高方差、信用分配困难、灾难性遗忘等经典病理,并在此基础上提出了包含五大核心优化原语的RCL(Reflective Context Learning)框架,为Agent无需参数更新即可持续自演进提供了理论基础与实践指导。
论文信息:Reflective Context Learning: Studying the Optimization Primitives of Context Space
作者:Nikita Vassilyev, William Berrios, Ruowang Zhang, Bo Han, Douwe Kiela, Shikib Mehri (Contextual AI)
发表状态:Preprint. Under review (2026年4月3日)
代码地址:GitHub
阅读时间:2026年4月19日
1. 核心动机与研究问题
1.1 主要研究动机
作者提出了两个根本性问题:
问题一:只修改Context而不修改模型参数,能否让Agent持续变强?
关键定义:这里"Context"(记为 $C$)不单指prompt,而是指所有对Agent[行为产生可解释影响的外部对象,包括:
- 结构化Playbook(行为规则手册)
- 持久Memory(记忆模块)
- Tool definitions(工具定义)
- Retrieval indices(检索索引)
- Operational guidelines(操作指导原则)
- 任何可读、可编辑、可解释的行为配置
Context是一个超集:$C \supset \text{"prompt"}$,包含Agent在执行期间可访问的任何artifact,无论是直接注入到context window中还是通过检索或tool use动态访问。
现代语言模型专门设计为有效的、忠实的指令遵循者(Ouyang et al., 2022; Anthropic, 2025),这种对$C$的敏感性使得context-space优化变得实用:对$C$的更新可靠地产生Agent行为的相应变化。
问题二:Context Learning 本质上也是一种优化问题,是否会遭遇传统参数优化的经典困境?
作者的核心论点是:Context Learning 与传统的参数空间优化(如SGD)在数学本质上同构,因此必然面临以下经典优化病理:
| 优化病理 | 在Context Learning中的表现 | 参数空间类比 |
|---|---|---|
| 高方差 | 单个失败样本的反馈可能引入噪声,导致context更新方向不稳定 | 随机梯度估计的高方差(Robbins & Monro, 1951) |
| 信用分配困难 | 失败可能由多个context条目共同导致,难以确定应该修改哪一项 | 稀疏奖励问题(Sutton & Barto, 2018) |
| 灾难性遗忘 | 为了适应新任务而修改context时,丢失了已掌握的知识 | 顺序学习中的灾难性干扰(McCloskey & Cohen, 1989) |
| 更新震荡 | Context在不同失败样本之间反复切换,无法收敛 | 状态less优化器的震荡(Polyak, 1964) |
| 局部最优 | 基于当前context的局部更新可能陷入次优策略 | 贪心优化中的局部最优(Mitchell, 1980) |
1.2 研究意义
这项工作的意义在于:
- 统一视角:将分散的prompt engineering、in-context learning、tool design等方法统一到一个优化框架下
- 系统性研究:不是提出某个特定技巧,而是像研究SGD那样系统性研究context优化的"原语"(primitives)
- 可解释性:Context优化具有天然的可解释性(修改的是自然语言规则而非不可读的参数)
- 未来-proof:随着模型能力提升,context优化的scope从"优化措辞"扩展到"学习真正的多步策略"

2. RCL 框架:Reflect-Update 循环
2.1 问题形式化
给定一个任务数据集 $D = \{(x_i, y_i)\}$,其中 $x_i$ 是输入(查询、环境状态或任务规范),$y_i$ 是ground-truth标签或reward函数 $R$,学习问题是找到context $C$ 以最大化期望性能:
$$ C^* = \arg\max_C \mathbb{E}_{(x,y)\sim D}[R(A(x, C), y)] $$其中 $A$ 是以base语言模型实现的ReAct loop Agent(Yao et al., 2023)。
2.2 RCL 三步循环
RCL将context learning统一为一个三步循环,每一步与梯度训练的一个阶段功能对应(Table 1):
| |
Execute(执行)
Agent带着当前context执行任务,得到trajectory和outcome:
$$ \tau = A(x, C_t), \quad r = R(\tau, y) $$trajectory $\tau$ 是actions、observations和中间推理步骤的序列。outcome $r$ 可能是binary、scalar或结构化的执行trace。
类比:在参数优化中,这对应forward pass $\hat{y} = f(x)$ 和loss计算 $L(\hat{y}, y)$。
Reflect(反思)
Reflector模块 $g$ 根据以下输入生成诊断信号 $\delta_t$:
$$ \delta_t = g(\tau, r, C_t) $$诊断 $\delta_t$ 是什么失败、为什么失败、以及 $C_t$ 的哪些组件应该被修订的自然语言分析。
类比:这是context-space的梯度计算 $\nabla_\theta L$:将执行经验转换为定向更新信号。关键区别是 $\delta_t$ 是由LLM对trajectory推理产生的,而非通过计算图微分;reflector可能是一个独立的、可能更强的模型。
Mutate(变异)
Mutator模块 $f$ 根据诊断信号和当前context产生更新后的context:
$$ C_{t+1} = f(C_t, \delta_t) $$类比:这是context-space的优化器步骤 $\theta_{t+1} = \theta_t - \eta \cdot \nabla_\theta L$。Mutator应用reflector的建议,受结构约束(如只修改特定playbook规则或维护版本历史)限制。
完整更新
$$ C_{t+1} = f(C_t, g(\tau_t, r_t, C_t)) $$类比强调:这种对应是功能的,非形式的。不存在可微分的loss surface,$\delta_t$ 可能是错的、模糊的或矛盾的,这是真实梯度不具备的。作者声称的是功能角色的保留,正如Table 1总结:reflector服务于梯度计算,mutator服务于优化器步骤,经典改进梯度学习的机制以相同底层原因改进反思式context学习。

2.3 Table 1: 功能对应关系
| Classical Concept | RCL Analogue | Prior Work |
|---|---|---|
| Parameters | Context artifact $C$ (playbook, memory, tools, guidelines) | 所有方法 |
| Forward pass $\hat{y} = f(x)$, Loss $L(\hat{y}, y)$ | Trajectory $\tau = A(x, C)$, Outcome $r = R(\tau, y)$ | ReAct, Voyager |
| Gradient $\nabla_\theta L$ | Reflective diagnostic $\delta = g(\tau, r, C)$ | ProTeGi, TextGrad |
| Optimizer step | Context update $C_{t+1} = f(C_t, \delta)$ | ACE |
| Minibatch $B \sim D$ | Trajectory batch per reflection step | ProTeGi, TF-GRPO |
| Momentum / Adam | Optimizer history + mutation ratio | ERM, Ding et al. |
| Replay buffer | Failure replay over historical hard cases | Dyn. Cheatsheet, ExpeL |
| Architecture choice | Context param. (flat vs. structured) | ACE, DSPy |
| Regularization | Structural constraints (diffs, error rule maps) | ACE, MIPRO |
3. 相关工作与Context-Space Learning的演变
3.1 根源:Prompt Engineering与离散Prompt调优
- Soft prompt tuning(Lester et al., 2021; Li & Liang, 2021):通过连续embedding上的梯度优化提供替代,但在一个梯度步骤产生微level扰动而非结构化、可解释的修订
- In-context learning(Brown et al., 2020):证明了context是一个强大的conditioning机制,但不涉及迭代精化
- Early discrete methods(如APE, Zhou et al., 2023):通过generate-and-score搜索引入迭代,建立context作为优化目标,但更新信号保持纯标量,没有诊断为何一个候选优于另一个
3.2 向真正学习的转变
真正的学习开始于将reflection作为更新机制的引入(Table 5):
| Method | Reflector | Mutator | State/Memory | Regime |
|---|---|---|---|---|
| Reflexion (Shinn et al., 2023) | Verbal self-critique | Append to memory | Episodic history | Single-ep. |
| ExpeL (Zhao et al., 2024) | Experience extraction | Insight reuse | Extracted knowledge | Cross-task |
| Agent-Pro (Zhang et al., 2024) | Belief + policy critique | DFS-style search | World model beliefs | Policy learn. |
| Dyn. Cheatsheet (Suzgun et al., 2026) | Failure summarization | Curated append | Persistent cheatsheet | Task learn. |
| ACE (Zhang et al., 2026) | Trajectory critique | Structured delta edits | Playbook history | Policy learn. |
| ProTeGi (Pryzant et al., 2023) | Minibatch text gradient | Beam search + bandit | LLM-proposed edit | Micro-opt. |
| TextGrad (Yuksekgonul et al., 2024) | Textual differentiation | LLM-proposed edit | Context update | Modular opt. |
| ERM (Yan et al., 2025) | Exemplar reflection | Beam | Historical feedback | Experiential library |
| TF-GRPO (Cai et al., 2025) | Semantic group advantage | Beam | Past distributions | Micro-opt. |
| Ding et al. (2025) | – | – | Sampling momentum | – |
| APE (Zhou et al., 2023) | None (score only) | None (score only) | – | Instr. search |
| EvoPrompt (Guo et al., 2024) | None (score only) | None (score only) | – | Instr. search |
| PromptBreeder (Fernando et al., 2024) | None (score only) | None (score only) | – | Instr. search |
| GEPA (Agrawal et al., 2026) | Pareto-aware reflection | Evolutionary + Pareto | Candidate pop. | Instr. search |
| DSPy (Khattab et al., 2024) | N/A (compiler) | Proposal scoring | Program structure | Program opt. |
| MIPRO (Opsahl-Ong et al., 2024) | Module-level compilation | Bayesian surrogate | Module-level state | Program opt. |
核心发展:
- Reflexion证明了verbal self-critique跨episode改善agent性能无需weight更新
- ProTeGi将此形式化为"textual gradients":从失败minibatches派生的批量自然语言批评,通过beam search应用
- TextGrad将梯度隐喻推广到复合AI系统,将多组件pipeline视为计算图,具有文本反馈传播
- ACE引入结构化的、增量delta编辑到模块化playbook
- TF-GRPO(Training-Free GRPO)通过对比语义优势的grouped rollouts进一步减少噪声
- ERM(Efficient and accurate prompt optimization with memory)保留历史反馈以防止信息丢失
- GEPA结合群体搜索与反思诊断
3.3 三个改进维度
从这个共享基础,先前工作探索了几个改进方向:
| 维度 | 意义 | 代表工作 |
|---|---|---|
| Structured parameterization | 从flat prompt到模块化表示实现本地化信用分配 | Dyn. Cheatsheet, ACE, DSPy, MIPRO |
| Variance reduction | ProTeGi的minibatching跨失败聚合批评 | ProTeGi, TF-GRPO |
| Optimizer state & momentum | ERM保留历史反馈,Ding et al.引入sampling-based momentum | ERM, Ding et al. |
| Search & frontier maintenance | EvoPrompt, PromptBreeder维护演进候选种群,GEPA结合群体搜索与反思诊断 | APE, EvoPrompt, PromptBreeder, GEPA |
| Policy-level learning | ExpeL提取可复用洞察用于跨任务迁移,Agent-Pro修订行为信念和指导原则 | ExpeL, Agent-Pro |
任何学习系统必须导航的三个基本维度:
- Parameterization:学习artifact的结构确定信用分配的粒度
- Signal quality:反思诊断的精度取决于reflector观察多少trajectory以及能否隔离关键决策
- Optimizer dynamics:没有momentum、replay或curriculum,stateless learner可能震荡、遗忘或过拟合到近期经验
论文指出的关键问题:这些方向在隔离中探索,每个在特定模型、prompting惯例、benchmarks和任务regimes下。模型能力和评估实践的快速共同演化使得改进归因于特定学习primitives变得困难。
4. 五大优化原语
4.1 核心更新循环
基础更新 $C_{t+1} = f(C_t, g(\tau_t, r_t, C_t))$ 是单样本、无状态、贪婪步骤:一个trajectory告知一个reflection,产生一个edit,没有prior迭代记忆,也没有机制逃离poor basin。
重复应用时,这个最小循环表现与其参数空间counterpart相同的pathologies——高方差更新、稀疏信用分配、灾难性遗忘、局部最优。作者引入五个primitive在循环的特定阶段解决这些pathologies(Table 2; Figure 1)。
4.2 Batching(批处理)
解决的问题:High variance from single samples(高方差)
目标阶段:Execution
先验工作:ProTeGi; TF-GRPO
单个trajectory $\tau$ 产生单个诊断 $\delta$,其内容被该example的特质dominated——这是parameter-space优化中minibatching解决的context-space analogue(Robbins & Monro, 1951; Pryzant et al., 2023; Cai et al., 2025)。
实现:不反思单个trajectory,每次迭代采样 $B$ 个任务 $\{x_1, ..., x_B\} \subset D$,执行每个,对每个失败trace独立反思,产生per-trace诊断 $\delta_1, ..., \delta_k$($k \leq B$ failures)。这些被联合传递给mutator:
$$ C_{t+1} = f(C_t, \delta_1, ..., \delta_k) $$Mutator识别跨diagnostics的重复模式并过滤one-off异常,减少跨任务分布的方差。当 $k = 0$(所有任务pass),不产生诊断,mutator不进行edit;这是现实场景,特别是在seed分数超过78%的AppWorld上。
类比:这parallels SGD中的minibatching,其中对 $B$ 样本平均梯度通过 $O(1/B)$ 减少更新方差;这里"averaging"由mutator推理而非算术平均执行。
实验发现:当失败分布broad时batching显示强gain(+5.4在AppWorld Normal/Lite上优于ACE),但当失败多样时可以actively hurt(在BrowseComp+/Lite上,batching相对于ACE降级-6.0,表明mutator被竞争信号overload)。
4.3 Grouped Rollouts(分组轨迹)
解决的问题:Confounded attribution(混淆归因)
目标阶段:Execution
先验工作:TF-GRPO(Training-Free Group Relative Policy Optimization)
每个任务 $x_i$ 在相同playbook $C_t$ 下执行 $G$ 次,产生一个组 $\{\tau_i^{(1)}, ..., \tau_i^{(G)}\}$ 带有outcomes $\{r_i^{(1)}, ..., r_i^{(G)}\}$。
包含pass和failures的组提供对比信号——reflector接收同一任务的成功trace $\tau^+$ 和失败trace $\tau^-$:
$$ \delta_i = g(\tau^+, \tau^-, r^+, r^-, C_t) $$使reflector能够隔离负责outcome差异的决策点,同时控制任务难度。当组不包含对比信号(所有 $G$ traces pass或全部fail),reflector回退到Eq. 3的单trace签名;Eq. 7的对比形式仅当两个outcome都存在时应用。这是reflector接收正trace的唯一设置,将其诊断扎根于演示的成功行为。
类比:Batching减少跨任务分布的方差;grouped rollouts减少每个任务内的方差,analogous to Monte Carlo方法中inter-sample和intra-sample方差减少的区别。
实验发现:当reflector需要对比信号时grouped rollouts帮助最多(+3.0在AppWorld Normal/Lite上优于ACE,+15.1在RewardBench2/Nano上,表中最大单gain),因为reflector在相同playbook下观察正确和错误排名,并能识别哪些标准实际预测而非仅从失败提出新程序规则。
4.4 Improved Credit Assignment(改进信用分配)
解决的问题:Sparse terminal reward(稀疏终端奖励)
目标阶段:Reflection
先验工作:TextGrad
outcome信号 $r = R(\tau, y)$ 是终端的,留下reflector将其归因于整个trajectory和playbook,没有中间监督——这与激励step-level奖励建模(Lightman et al., 2023)和value分解(Sunehag et al., 2017)的稀疏奖励问题相同。
Dual-trace credit assignment:令 $C_t^{ann}$ 表示 $C_t$ 的标注变体,在每个entry $e_i$ 中注入XML instrumentation,提示agent引用它consult哪些entries,标记uncertainty,以及在哪里缺少guidance。每个任务并发执行两次:
$$ \tau^{std} = A(x, C_t), \quad r^{std} = R(\tau^{std}, y) $$$$ \tau^{ann} = A(x, C_t^{ann}), \quad r^{ann} = R(\tau^{ann}, y) $$标准trace $\tau^{std}$ 保持未污染用于评估;标注trace $\tau^{ann}$ 使agent的决策过程可观测,启用entry-level attribution。Reflector接收两个trace但只接收标准outcome:
$$ \delta = g(\tau^{std}, \tau^{ann}, r^{std}, C_t) $$标注outcome $r^{ann}$ 被排除,因为instrumentation改变agent的行为,使 $r^{ann}$ 成为playbook质量的不可靠measure;标注trace仅因其决策过程可观测性使用,非其outcome。
当与grouped rollouts组合时,每个任务总执行次数变为 $G + 1$:$G$ baseline traces加一个annotated trace,从对比组中排除,因为instrumentation改变行为。
实验发现:信用分配在AppWorld上增加modest value,多步程序trace受益于entry-level attribution,但不在BrowseComp+上,其中终端反馈已将问题本地化到agent的搜索策略而非个别playbook entries。
4.5 Auxiliary Losses(辅助损失)
解决的问题:Surface-level diagnostics(表层次诊断)
目标阶段:Reflection
先验工作:–(论文未列出先验工作)
没有显式结构,无约束反思向表层次trajectory复述collapse——analogous to auxiliary objectives在多任务学习中防止的表示collapse(Jaderberg et al., 2016)。在两个level施加结构:
Playbook Parameterization(Playbook参数化)
$C$ 组织为具独立可寻址entries $e_1, ..., e_N$ 的命名sections,mutator被约束表达更新为本地化编辑操作——UPDATE(e_j, e_j')、ADD(e_{N+1})、DELETE(e_k)——而非整体重写。这种结构约束analogous to parameter space中的sparsity regularization:限制每次更新的自由度,防止mutator进行过度拟合到当前batch的sweeping改变。
Reflection Schema(Reflection Schema)
Reflector $g$ 分解为三个并行诊断heads:
$$ \delta = \delta_{attr}, \delta_{root}, \delta_{gap} $$其中:
- $\delta_{attr} \in \{\text{actionable gap, execution variance, intractable}\}$ 是失败归因分类
- $\delta_{root}$ 是根因分析
- $\delta_{gap}$ 指定当前playbook的覆盖gap
这些heads与mutator交互:execution-variance归因向no-ops偏置(防止来自噪声信号的不必要编辑),而actionable-gap归因具特定根因驱动targeted添加或修改。分解强制reflector产生结构化诊断而非非结构化叙事,analogous to multi-task learning中的辅助loss heads强迫中间表示捕获输入的特定方面。
实验发现:辅助losses相对于ACE在7 of 8 settings改进,但从完整RCL移除它们只产生适度降级并在most conditions甚至改进RewardBench2/Nano(+12.6 points)。这表明over-structuring可能hurt某些设置,特别是当reflection schema与任务需求misalignment时。
4.6 Failure Replay(失败重放)
解决的问题:Forgetting learned tactics(遗忘学习策略)
目标阶段:Sampling
先验工作:Dyn. Cheatsheet; ExpeL
单个reflection-mutation循环可能无法解决失败:edit可能partial,可能与现有entries $e_i$ 负面交互,或仅在不同batch context中重新遭遇时明显需要精化。经验replay buffer解决parameter-space learning中的analogous issues(Lin, 1992; Schaul et al., 2016);在context space,其中edits可以直接矛盾或subsume彼此,需求至少同样acute。
实现:维护一个failure replay buffer $B_t$,修改每次迭代的采样分布。令 $\rho \in [0, 1]$ 为replay ratio。每次迭代,$\rho B$ 任务从 $B_t$ 绘制,剩余 $B - \rho B$ 从 $D$ 新采样:
$$ \{x_1, ..., x_B\} \sim (1 - \rho) \cdot \text{Uniform}(D) + \rho \cdot \text{Uniform}(B_t) $$任务失败时进入 $B_t$,由两个阈值管理:
- Graduate:任务在跨迭代 $n_{grad}$ 连续passes后被移除,确认playbook已durably学习处理它
- Evict:任务在跨迭代 $n_{evict}$ 连续failures后被驱逐,表明它在当前playbook下可能intractable,不应主导训练信号
这实现一个curriculum,集中优化effort在marginal return最高处,analogous to prioritized experience replay(Schaul et al., 2016),其中样本按学习utility加权而非均匀绘制。
实验发现:移除failure replay在3 of 8 settings产生largest drop,包括表中single largest regression在BrowseComp+/Nano上(-18.0)和AppWorld Challenge/Nano上(-8.8),表明replay对反复精化困难失败至关重要。
4.7 Optimizer State(优化器状态)
解决的问题:Oscillation from stateless updates(状态less更新引起的震荡)
目标阶段:Mutation
先验工作:ERM; OPRO
Stateless optimizer可能恢复两轮前的改变,因为激励它的证据已scroll出context——这是momentum(Polyak, 1964; Kingma & Ba, 2015)设计防止的震荡analogue。在基于梯度的优化中,momentum维护指数移动平均 $m_t = \beta m_{t-1} + (1 - \beta) \nabla_\theta L_t$,平滑更新轨迹。作者在context space实现analogous机制。
实现:维护一个结构化的、滚动优化状态文档 $S_t$,每次迭代后由专用模型调用 $h$ 更新:
$$ S_{t+1} = h(S_t, \delta_1, ..., \delta_k, C_t, C_{t+1}) $$$S_t$ 追踪:
- Change ledger:修改了什么以及为什么
- Playbook assessment:哪些entries工作良好vs.不佳
- Open hypotheses:conjectured失败模式尚未确认
- Optimization phase:exploratory vs. convergent
状态文档注入到mutator但从reflector排除:
$$ C_{t+1} = f(C_t, \delta_1, ..., \delta_k, S_t) $$这种不对称镜像Adam中momentum如何在优化器步骤而非梯度计算上操作:refactor的诊断 $\delta_i$ 保持未被past迭代共识偏置,而mutator可以使用 $S_t$ 上下文化当前诊断,避免恢复先前验证的改变,并保持跨迭代一致性。
类比:这为context-space优化提供与parameter space中momentum类似的稳定化效果。
实验发现:Optimizer state达到全覆盖最早(iteration 10)并达到高peak TGC(91.2%)并强relearning(92%):滚动状态文档防止mutator恢复有用编辑,提供与参数空间优化中momentum类似的稳定化效果。
4.8 完整composed更新
结合所有五个primitive,RCL更新变为:
$$ C_{t+1} = f(C_t, g(\tau^+, \tau^-, \tau^{ann}), \{r_i\}, C_t | \tilde{B}_t, S_t) $$其中 $\tilde{B}_t$ 表示replay-mixed batch的 $B$ 任务(Eq. 11),每个执行 $G + 1$ 次(grouped rollouts加一个annotated trace),$g$ 是Eq. 10的多头reflector,$S_t$ 是优化器状态。
每个primitive解决此更新特定阶段的distinct pathology;Section 4.2评估它们的individual和composed贡献。
5. 实验设计
5.1 设置
在三个放置不同需求于优化循环的benchmarks上评估:
| Benchmark | 类型 | 评估指标 | 训练集 | 测试集 | Seed分数 | 任务类型 |
|---|---|---|---|---|---|---|
| AppWorld (Trivedi et al., 2024) | 多步交互编码 | TGC (Task Goal Completion) | 90任务 | Normal (168), Challenge (417) | 78-82% | 程序化失败模式修正 |
| BrowseComp+ (Chen et al., 2025) | Web研究 | LLM-judged accuracy | 100查询 | 30验证, 150测试 | 29-41% | 技能获取,发现一般搜索启发式 |
| RewardBench2 (Malik et al., 2025) | 响应排序 | Accuracy | 1,307示例 | 277验证, 281测试 | 68-76% | 校准问题,精化判别标准 |
Regime特征:
- AppWorld:seed-to-ceiling gap窄,optimization问题resemble finetuning,其中base model已拥有核心能力,增益来自修正程序失败模式
- BrowseComp+:gap宽,问题更接近skill acquisition,要求模型发现它尚未拥有的一般搜索启发式
- RewardBench2:near-deterministic, non-agentic环境使这成为校准问题——精化判别标准而非学习新程序或策略
模型:
- Agent models:Gemini 3.1 Flash Lite (Lite) 和 GPT-5.4 Nano (Nano)
- Optimizer model:Claude Opus 4.6(作为reflector和mutator)
- 训练30 iterations,在从未见过训练的held-out splits上评估
5.2 Baselines
ACE(Zhang et al., 2026):主要baseline,作为所有实验构建的基础优化循环,对应Eq. 5,无Section 3中的primitives active。采用其结构化delta编辑、helpful/harmful bullet scoring、以及Generator→Reflector→Curator分解。省略两个可选机制:(i) embedding-based去重步骤,用显式更新/删除操作替代,(ii) multi-round Reflector精化,使用单reflection pass。
GEPA(Agrawal et al., 2026):sample-efficient prompt optimizer,收集执行traces并应用自然语言reflection诊断错误和提议prompt修订。遗传Pareto搜索在候选prompts上维持多样性frontier,帮助避免局部最优。
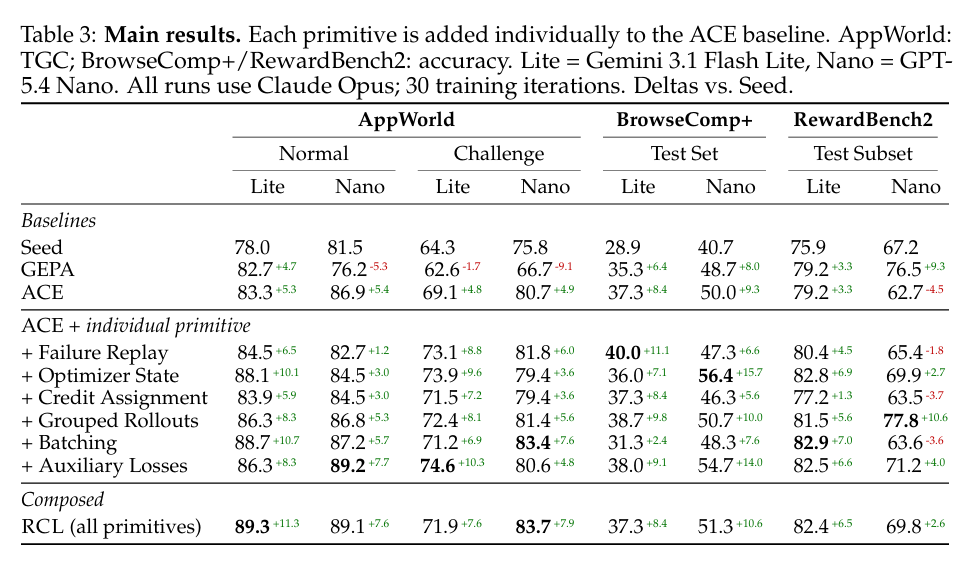
5.3 主要发现
Reflection quality给出最佳compute回报
Optimizer state和auxiliary losses——改进reflector和mutator无需额外任务执行——在所有三个benchmarks的most conditions上优于ACE:
- Optimizer state在AppWorld Normal/Lite上添加+4.8 TGC,在BrowseComp+/Nano上+6.4 accuracy
- Auxiliary losses在AppWorld Challenge/Lite上添加+5.5,在RewardBench2/Nano上+8.5
Grouped rollouts也可靠改进,但以额外执行cost。由于两个最便宜primitive是最有效之一,诊断精度比执行量更重要。
执行端primitive必须调优到任务dynamics
- Batching当失败分布broad时显示强gain(+5.4在AppWorld Normal/Lite上优于ACE),但当失败多样时可以actively hurt(在BrowseComp+/Lite上降级-6.0)
- Grouped rollouts当reflector需要对比信号时帮助最多(+15.1在RewardBench2/Nano上,表中最大单gain)
- Credit assignment在AppWorld上添加modest value,多步程序trace受益于entry-level attribution,但不在BrowseComp+上
这些结果表明配置执行端primitive到目标环境的variance结构和难度分布而非均匀应用它们。
Seed-to-ceiling gap塑造学习类型
- AppWorld:gap窄,多个primitive贡献:batching和optimizer state在Normal/Lite上lead(相对于ACE +5.4和+4.8),而auxiliary losses和optimizer state在Challenge/Lite上lead(+5.5和+4.8)。学到的playbook确认增量通过ADD mutations积累targeted程序规则。
- BrowseComp+:gap宽,结果agent-dependent:optimizer state对Nano给予最大gain(+6.4相对于ACE)但slightly degrade Lite(-1.3),其中failure replay lead代替(+2.7)。Playbook显示high ratio的UPDATE mutations,策略在重复遭遇上精化。
- RewardBench2:near-deterministic环境使over-instruction pose最大风险。不像AppWorld和BrowseComp+,其中agent执行多步程序,RewardBench2是单turn judgment任务,从程序失败模式学到的playbook entries(如结构化trigger/procedure规则)可以与任务要求的自然主义推理interfere。对比信号(grouped rollouts)在此regime提供最有效学习信号,改进Nano从62.7到77.8(+15.1相对于ACE,+10.6相对于Seed)。
5.4 Primitive交互下的组合
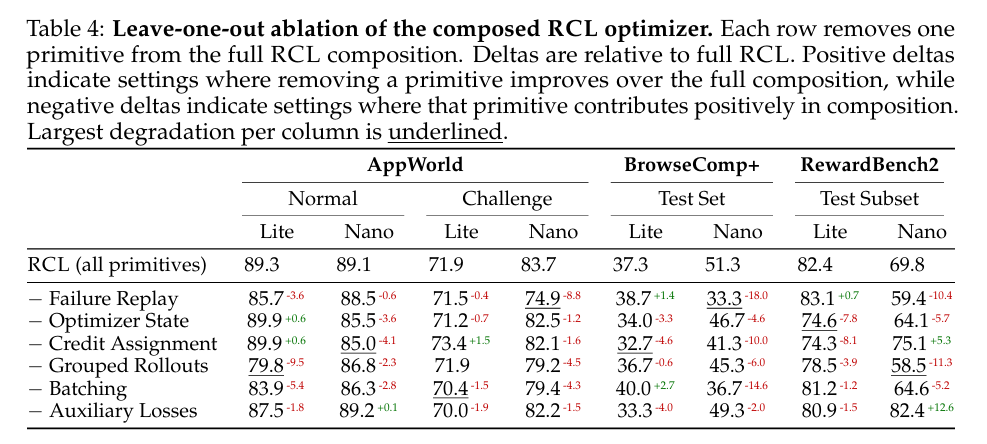
Standalone value不预测compositional role:为了区分marginal gains与compositional role,执行完整RCL optimizer的leave-one-out ablations。Table 3测量将单个primitive添加到ACE的marginal value,而Table 4测量一旦完整optimizer组装该primitive的角色。这些不是相同quantity。
关键发现:
- Auxiliary losses:作为ACE的standalone添加,它们在7 of 8 settings改进,但从完整RCL移除它们只产生适度降级并在most conditions甚至改进RewardBench2/Nano(+12.6 points)
- Credit assignment:Converse pattern。作为ACE的standalone添加,它只帮助3 of 8 settings并tie一个,但从完整RCL移除它在3 settings产生largest drop——AppWorld Normal/Nano、BrowseComp+/Lite、RewardBench2/Lite——并在BrowseComp+/Nano上进一步10.0 point drop
- Batching:在BrowseComp+/Nano上显示类似reversal:作为ACE添加hurt,但从完整RCL移除引起14.6 point drop
Standalone gains因此不能可靠预测primitive的compositional role。
两个primitive特别load-bearing:
- 移除grouped rollouts在7 of 8 settings hurt并tie剩余一个;它从不exceed完整RCL并在AppWorld Normal/Lite(-9.5)和RewardBench2/Nano(-11.3)上产生largest drop
- 移除failure replay显示类似强模式,包括largest drop在AppWorld Challenge/Nano(-8.8)和表中single largest regression在BrowseComp+/Nano上(-18.0)
完整optimizer因此依赖于几个互补机制,即使它们的效果足够重叠以至于standalone ablations是compositional contribution的poor proxy。
剩余交互是regime-dependent:
- BrowseComp+对Nano移除failure replay(-18.0)、batching(-14.6)和credit assignment(-10.0)特别敏感
- RewardBench2/Nano显示不同pattern:移除grouped rollouts sharply hurt(-11.3),强化对比信号在near-deterministic校准任务中的重要性,而移除auxiliary losses(+12.6)和credit assignment(+5.3)改进性能
Context-space optimization中的primitive贡献是真实的但非additive。它们的效果取决于任务regime、agent以及与之组合的其他机制。
5.5 训练动态
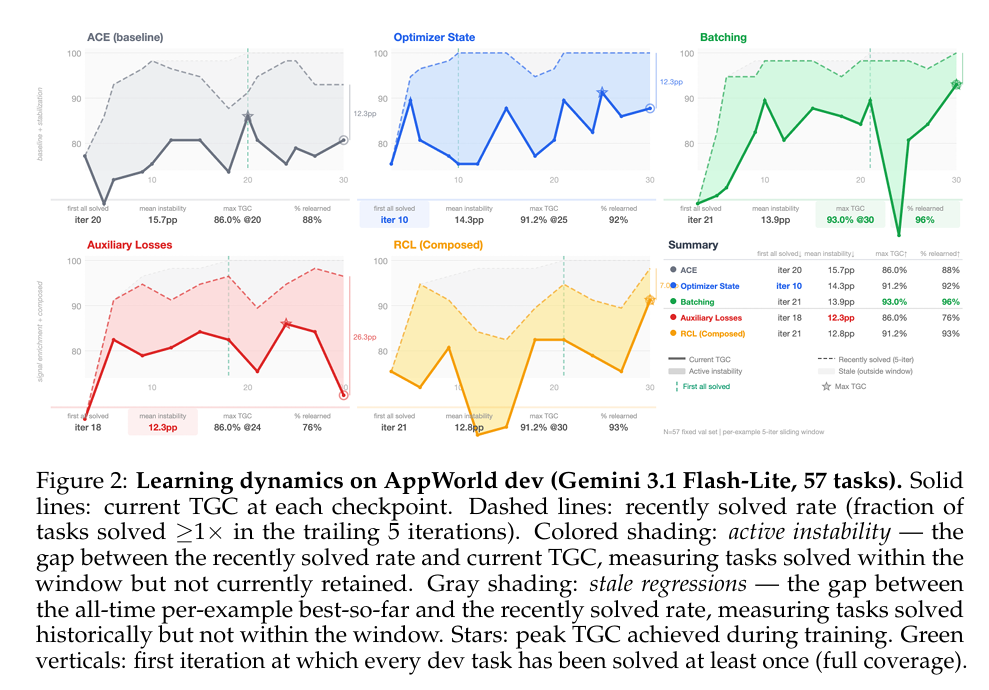
为了理解优化轨迹——progress是steady或oscillatory,学到的能力是否被retained或forgotten——在每个checkpoint使用Gemini 3.1 Flash-Lite agent在固定57任务AppWorld dev集上追踪per-example solve状态。
度量:
- Current TGC(实线):该checkpoint解决的dev任务分数
- Recently solved rate(虚线):过去 $w=5$ 迭代trailing window内至少解决一次的dev任务分数
gap之间分解为两个成分:
- Active instability(着色阴影):窗口内解决但当前不retained的分数——recent regressions,能力在窗口内演示但当前未保持
- Stale regressions(灰色阴影):all-time per-example best-so-far与recently solved rate之间的gap——tasks历史上某点解决但不在trailing window内——训练早期能力丢失且未恢复
报告每run的四个汇总统计:
- First all solved:每个dev任务至少解决一次的首次迭代(cumulative, all-time)
- Mean instability:跨所有checkpoints平均active instability gap
- Max TGC:任何单checkpoint的最高current TGC
- % relearned:当任务在连续checkpoints间从solved切换到unsolved时为unlearn event;如果它稍后flip回solved为recovery。% relearned是最终恢复的unlearn events分数,测量forgetting多久可逆
结果:
- Optimizer State:最早达到全覆盖(iteration 10),达到高peak TGC(91.2%)并强relearning(92%):滚动状态文档防止mutator恢复有用编辑,提供与参数空间优化中momentum类似的稳定化效果
- Batching:较晚达到全覆盖(iteration 21),展示较大mid-training oscillations,但达到任何configuration的最高peak TGC(93.0%)并最高relearning rate(96%):与variance-reduction解释一致,其中较大batches早期产生noisier signal但随着失败分布变得well-characterized产生increasingly robust signal
- Auxiliary Losses:展示distinctive profile:最低mean instability(12.3pp)但也最低relearning rate(76%)和peak TGC(86.0%)不高于ACE baseline。这建议保守而非exploratory dynamic——结构化诊断产生稳定、targeted edits,但regressions当它们发生时tend to be permanent且primitive发现较少novel solutions
- Composed RCL:继承complementary strengths:低instability(12.8pp,仅次之Auxiliary Losses),高peak TGC(91.2%,匹配Optimizer State),强relearning(93%),与complementary-pathology观点一致
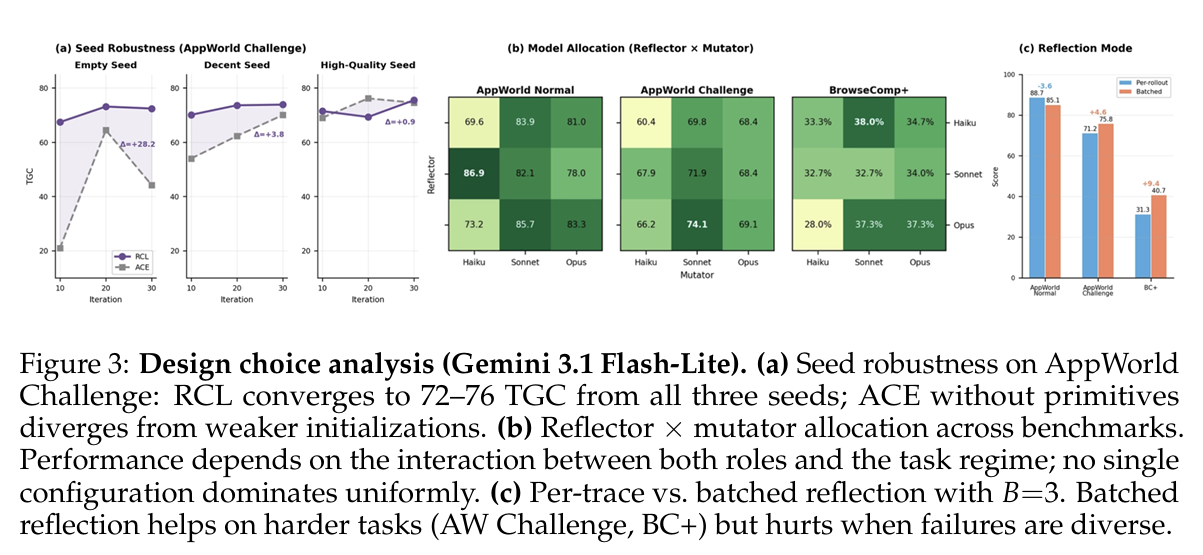
5.6 对初始化的敏感性
Figure 3a在AppWorld Challenge上跨三个质量levels变化seed playbook:
- (I) empty(0 entries)
- (II) decent(7 entries跨4 sections)
- (III) high-quality(9 entries跨5 sections)
发现:
- RCL从所有三个收敛到72-76% TGC,而ACE无primitive从empty seed严重震荡(44.2在iteration 30 vs. RCL的72.4)
- Primitive贡献与seed质量成反比:
- Empty seed: +28.2
- Decent seed: +3.8
- High-quality seed: +0.9
此模式与primitives解决真实优化pathologies一致——variance、forgetting、instability——当初始化弱时效果最大。从empty seed,ACE必须同时发现有用规则并跨迭代保持它们,所以noisy更新和regressions特别costly;添加primitives使那些早期改进更容易积累。从强seed,错误更少且更local,所以这些稳定机制的marginal value收缩。ACE从empty初始化的分歧与此解释一致。
5.7 模型分配
Figure 3b跨所有九个Haiku、Sonnet和Opus组合独立变化reflector和mutator模型。
发现:
- 更强reflector倾向于在更难任务上帮助:Opus reflector配Sonnet mutator在AppWorld Challenge上达到74.1%,该split最佳configuration
- 但pattern在整体模型能力上非单调。在AppWorld Normal和BrowseComp+上,Haiku作为reflector配Sonnet作为mutator匹配或exceed几个Opus-reflector configurations
- 更strikingly,Opus作为mutator尽管是最强模型并不dominate;Sonnet是最跨benchmarks一致强大的mutator
- 作者假设这反映两个角色需求的不同:reflection要求多步失败的诊断推理,而mutation要求忠实、约束编辑——模型太capable在后一role可能over-interpret诊断而非精确执行它。跨三个不同task structures的benchmarks的此pattern一致性表明,匹配reflector输出复杂度与mutator执行capacity比uniformly最大化capability更重要
5.8 Per-Trace vs. Batched Reflection
在Section 3.1中,batching定义为执行端primitive:每次迭代采样 $B$ 任务并呈现它们的diagnostics给mutator。一个单独设计选择是聚合发生位置——refactor是否在单次调用中看到所有 $B$ traces(batched reflection)或每个独立反思,聚合延迟到mutator。
Figure 3c在 $B=3$ 比较这些模式。
发现:
- Batched reflection在更难任务上改进over per-trace reflection(AppWorld Challenge +4.6,BrowseComp+ +9.4),但在AppWorld Normal上降级(-3.6)
有用解释per-trace reflection是为每个trace产生有噪声定向更新,analogous to随机梯度估计。Mutator然后执行context-space analogue的minibatch步骤,通过将多个 $\delta_i$ 调和为单playbook更新。Batched reflection改为要求reflector从几个trace一次性估计共享更新方向。这可以在失败足够coherent以支持跨trace综合时帮助,如在更难任务上,但当剩余失败多样且需要更多localized corrections时可以hurt。
这种区别也阐明Table 3中与batching结果的交互,其中batching降级BrowseComp+ -6.0相对于ACE。关键差异是reconciliation发生位置:在batching中,多个独立诊断传递给mutator,必须reconcile它们;在batched reflection中,reflector跨traces综合并传递单coherent信号。在reflector的聚合在BrowseComp+上帮助(相对于per-trace)而mutator的聚合hurt(相对于ACE),表明在具有多样失败的regimes中,mutator reconciling竞争推荐的能力——而非信号volume——是binding constraint。
对于main experiments,因此使用per-trace reflection并非因为batched reflectionuniformly worse,而是因为它保持模块化RCL分解并与grouped rollouts更干净地组合,其对比信号定义在individual-task level。
6. 关键洞察与贡献
6.1 四个主要发现
- 诊断精度比执行量更重要:改进reflection signal的primitive给出最大每单位compute回报
- 哪些primitive help取决于task regime,且组合非additive:无单primitive domimates,且完整optimizer不uniformly beat最佳individual one
- 匹配模型capacity与每个role比最大化更重要:忠实mutator配强reflector outperforms reverse
- Context-space训练动态镜像parameter-space现象:震荡、momentum-stabilized convergence、稳定性与relearning的权衡
6.2 统一视角
将多种分散的context-optimization方法(Reflexion, ProTeGi, TextGrad, ACE等)重新cast为共享学习循环实例,并系统研究经典优化primitives在controlled conditions下如何在context space组合。
6.3 开放方向
- Adaptive primitive selection:基于当前训练phase或任务属性选择激活哪些primitive——可能减少手动配置需求
- Second-order state tracking:优化器关于自身编辑轨迹而非仅当前batch的推理——可能进一步稳定收敛
- Extension to continual deployment:任务分布随时间shift且playbook必须适应而不forgetting——是自然下一步
6.4 更广泛影响
这些发现表明context-space optimization将受益于与经典ML带给weight更新相同的系统discipline:诊断pathologies、组合remedies、研究它们的交互。随着模型增长更capable,通过context updates可学习的scope随它们增长——使该学习过程的principled optimization increasingly重要。
7. 拓展阅读
核心参考文献
- Reflective Context Learning: Studying the Optimization Primitives of Context Space - 本文
- Reflexion: Language Agents with Verbal Reinforcement Learning - Verbal self-critique
- Automatic Prompt Optimization with “Gradient Descent” and Beam Search - ProTeGi
- TextGrad: Automatic “Differentiation” via Text - TextGrad
- Agentic Context Engineering: Evolving contexts for self-improving language models - ACE
- Training-Free Group Relative Policy Optimization - TF-GRPO
相关理论工作
- ReAct: Synergizing reasoning and acting in language models - ReAct loop
- A Comprehensive Survey of Self-Evolving AI Agents - Self-evolving agents综述
- A Survey of Context Engineering for Large Language Models - Context工程综述
- A Survey of Automatic Prompt Engineering: An Optimization Perspective - Prompt优化综述
优化理论
- Adam: A method for stochastic optimization - Adam优化器
- Prioritized experience replay - 优先经验重放
- Overcoming catastrophic forgetting in neural networks - 灾难性遗忘
- Catastrophic interference in connectionist networks - 经典遗忘研究