第二部分:筑基篇——不可或缺的先修知识
“如果你不知道数据是如何表示的,你就不知道模型在学什么;如果你不知道模型在优化什么,你就不知道它为什么会失败。”
3D生成AI是一个极度跨学科的领域。它要求研究者同时具备3D计算机图形学的几何直觉和深度学习的优化理论。本章的目标不是泛泛而谈,而是为后续所有技术细节打下数学上严谨、工程上可落地的基础。我们会从最底层的表示方法出发,逐步建立起连接图形学与深度学习的完整知识图谱。
2.1 3D计算机图形学基础
2.1.1 五种核心表示方法(重点中的重点)
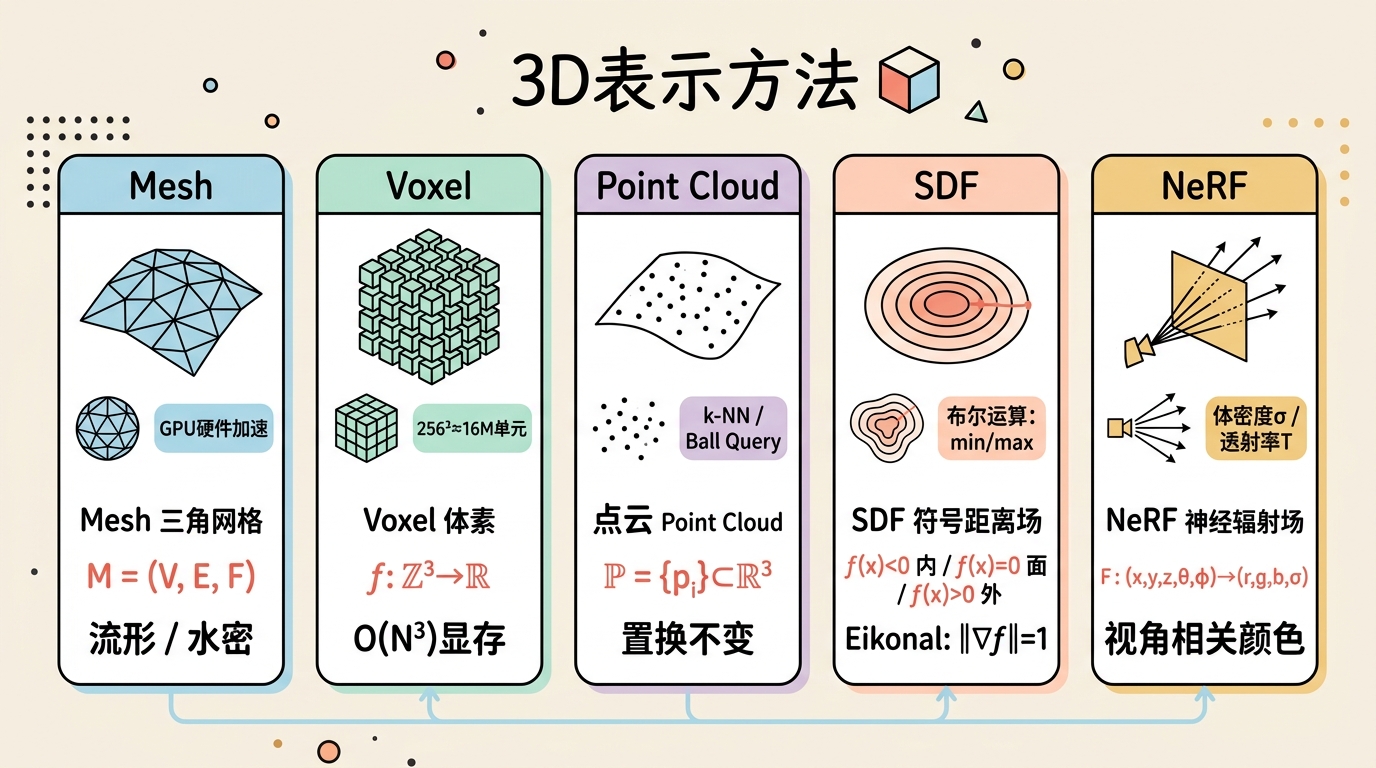
在3D生成AI中,表示(Representation)就是一切。神经网络最终输出的不可能是"一个物体"的抽象概念,它必须选择一种数学结构来编码几何与外观。不同的表示决定了:模型的架构设计、损失函数的构造、训练难度的量级,以及最终生成结果的用途。
多边形网格(Polygon Mesh)
精确数学定义
一个多边形网格是一个三元组 $\mathcal{M} = (V, E, F)$,其中:
- 顶点集合 $V = \{v_1, v_2, \dots, v_N\} \subset \mathbb{R}^3$;
- 边集合 $E \subset V \times V$,其中每条边 $e_{ij} = (v_i, v_j)$;
- 面集合 $F$,每个面 $f \in F$ 是顶点的一个循环子集。在计算机图形学中,我们几乎总是使用三角网格,即每个面恰好包含3个顶点:$f = (v_i, v_j, v_k)$。
一个网格是**流形(Manifold)**的,当且仅当每个点 $p \in \mathcal{M}$ 存在一个邻域 $U_p$,使得 $U_p$ 同胚于(homeomorphic to) either $\mathbb{R}^2$(内部点)或 $\mathbb{R}^2_{\geq 0}$(边界点)。直观地说,流形网格在局部看起来必须像一张纸或半张纸——不允许存在"三张纸在一个边上交汇"(非流形边)或"多张纸在一个点交汇"(非流形顶点)的情况。
一个网格是水密(Watertight)的,如果它是封闭的2-流形:每条边恰好被两个面共享,且没有边界边。水密性在3D打印和物理仿真中至关重要,因为开放的表面没有明确定义的"内部"与"外部"。
直觉解释
想象你正在用折纸制作一个模型。顶点是你折出的每个尖点,边是折痕,面是纸面本身。流形条件意味着你绝不能让三张纸共用一条折痕(否则局部拓扑就不是平面了)。水密条件意味着你的折纸必须完全封闭,不能有破洞。
为什么重要:网格处理的基石——半边数据结构(Half-edge Data Structure)
在AI生成网格之前,我们需要理解网格在计算机中如何被高效存储和遍历。半边数据结构是现代网格处理的基石,因为它将"无向"的边拆分为两条有向的"半边",从而用局部一致性替代了全局搜索。
结构定义: 每条半边 $\vec{e}$ 存储:
origin:起点顶点twin:反向的孪生半边next:沿当前面循环的下一条半边prev:沿当前面循环的前一条半边face:所属的 face 指针
遍历伪代码:
| |
半边结构的核心优势是:所有邻域查询都是 $O(1)$ 起步、$O(k)$ 完成,其中 $k$ 是局部邻域大小。这在网格细分、曲面简化、Remeshing 等算法中不可或缺。
GPU渲染管线中的角色
现代GPU不认识"半边",它只认识顶点缓冲对象(VBO)和索引缓冲对象(IBO)。VBO 是一个扁平的浮点数组,存储所有顶点属性(位置、法向、UV、颜色);IBO 存储面如何索引 VBO 中的顶点。
- VBO:$[x_1, y_1, z_1, nx_1, ny_1, nz_1, u_1, v_1, \dots]$(交错或分离布局)
- IBO:$[i_1, j_1, k_1, i_2, j_2, k_2, \dots]$(每个三角形三个索引)
**顶点数组对象(VAO)**记录了这些缓冲的绑定状态,使得一次 glDrawElements 调用就能将完整的网格提交给GPU。
顶点着色器处理每个VBO中的顶点,执行模型-视图-投影变换($M_{mvp} = P \cdot V \cdot M$);随后光栅化器根据IBO装配三角形,在像素级别进行插值和着色。
在AI生成中的角色:为什么Mesh仍然是最终交付格式?
尽管NeRF、SDF、点云在研究中极为流行,但游戏引擎、3D打印、CAD软件和Web3D仍然只认Mesh。这是一个典型的**生态锁定(Ecosystem Lock-in)**问题:
- GPU光栅化管线对三角网格有硬件级优化;
- UV参数化、骨骼绑定、材质贴图都依赖网格的拓扑结构;
- 物理引擎(PhysX、Bullet)需要封闭流形网格来计算碰撞和体积。
因此,几乎所有3D生成AI pipeline的最终步骤都是某种形式的"提取网格"——无论是Marching Cubes从SDF中提取,还是Poisson重建从点云中拟合。
体素(Voxel)
精确数学定义
体素是三维空间中的规则采样,可以形式化为一个离散函数:
$$f: \mathbb{Z}^3 \rightarrow \mathbb{R}$$其中定义域 $\mathbb{Z}^3$ 表示三维整数格点,值域 $\mathbb{R}$ 的含义取决于具体应用:可以是二值占用(0/1)、有符号距离(SDF值)、密度值(如NeRF的$\sigma$)或材质特征。
直觉解释
如果把2D像素想象成墙面上的小瓷砖,那么体素就是房间里的小立方块。但关键差异在于邻接关系:2D像素有4-邻接(上下左右)和8-邻接(包含对角);3D体素有6-邻接(面接触)、18-邻接(面或边接触)和26-邻接(面、边或顶点接触)。这个差异看似微小,但在表面提取(Marching Cubes)和形态学操作中会导致完全不同的连通性定义。
稀疏性分析
假设一个 $N \times N \times N$ 的体素网格。存储整个网格需要 $O(N^3)$ 的内存。但考虑一个光滑闭合曲面:它的表面积是 $O(N^2)$(在离散分辨率下),而内部体积是 $O(N^3)$。
对于3D生成AI,这意味着:
- 一个 $256^3$ 的稠密体素网格有 16,777,216 个单元;
- 如果每个单元存一个32位浮点数,仅原始数据就需要 64 MB;
- 3D U-Net 的中间特征图可能是 32 通道 × $256^3$,这轻松超过 2 GB 显存;
- 这就是为什么 $256^3$ 通常被认为是消费级GPU的显存瓶颈。
八叉树(Octree)的数学结构
八叉树是一种自适应空间划分结构。每个节点对应一个轴对齐的立方体区域 $[x_0, x_1] \times [y_0, y_1] \times [z_0, z_1]$。分裂规则为:如果节点区域与物体表面相交(或满足某种误差准则),则将其均分为8个子立方体(沿每个维度中点切分)。
Morton编码(Z-order curve):为了加速邻域查询和空间一致性访问,八叉树节点通常按Morton码排序。对于坐标 $(x, y, z)$,其Morton码通过位交错(bit interleaving)得到:
$$\text{Morton}(x, y, z) = \sum_{i=0}^{k-1} \left( (x_i \ll 3i) \mid (y_i \ll (3i+1)) \mid (z_i \ll (3i+2)) \right)$$其中 $x_i, y_i, z_i$ 是坐标第 $i$ 位。Morton码的美妙性质是:空间上相近的节点,其Morton码在整数排序中也相近(虽然存在"跳跃")。
在AI中的具体应用:3D U-Net
3D U-Net 是体素生成的主流架构。其编码器通过 3D 卷积和池化逐步降低空间分辨率,同时增加通道数;解码器通过 3D 反卷积/上采样恢复分辨率,并拼接编码器的skip connection。
| |
显存开销主要来自于:1)特征图的 $O(N^3)$ 体积;2)反向传播时保存的中间激活值。稀疏卷积(Sparse Convolution)是解决这一问题的关键,它只在被占据的体素上执行计算。
点云(Point Cloud)
精确数学定义
点云是一个无序集合 $\mathcal{P} = \{p_i\}_{i=1}^N \subset \mathbb{R}^3$。这里"集合"的强调至关重要:点云是**置换不变(permutation invariant)**的,即
$$\{p_1, p_2, \dots, p_N\} = \{p_{\pi(1)}, p_{\pi(2)}, \dots, p_{\pi(N)}\}$$对任意置换 $\pi \in S_N$ 成立。这与图像(像素有固定的空间排列)有本质区别。
直觉解释
点云就像向一个物体表面"撒了一把沙子"。每粒沙子只知道自己的位置,不知道邻居是谁,也不知道全局结构。然而,人类却能从这些散点中识别出物体——这说明局部密度和空间分布包含了丰富的几何信息。
局部邻域定义:k-NN和Ball Query
由于点云没有显式的连接关系,所有局部操作都依赖邻域查询:
k-NN(k-Nearest Neighbors):对每个点 $p_i$,找到欧氏距离最近的 $k$ 个点:
$$\mathcal{N}(p_i) = \{p_j \mid \|p_i - p_j\| \leq r_k\}$$其中 $r_k$ 是到第 $k$ 近点的距离。
Ball Query(半径查询):给定半径 $r$,找到球内所有点:
$$\mathcal{N}_r(p_i) = \{p_j \mid \|p_i - p_j\| < r\}$$
k-NN 保证每个点有固定的邻域大小,适合需要固定感受野的神经网络层;Ball Query 保证固定的空间尺度,更适合几何性质随尺度变化的分析。在 PointNet++ 中,Ball Query 通常被用于分层特征提取。
法向估计:PCA局部平面拟合的完整推导
法向是点云最重要的局部几何属性之一。估计法向的标准方法是主成分分析(PCA):
设点 $p$ 的邻域为 $\mathcal{N}(p) = \{q_1, \dots, q_k\}$。
计算邻域质心:
$$\bar{q} = \frac{1}{k} \sum_{i=1}^k q_i$$构建协方差矩阵(实际上是散布矩阵,未除以 $k-1$):
$$C = \sum_{i=1}^k (q_i - \bar{q})(q_i - \bar{q})^T \in \mathbb{R}^{3 \times 3}$$对 $C$ 进行特征值分解:
$$C v_j = \lambda_j v_j, \quad \lambda_1 \geq \lambda_2 \geq \lambda_3 \geq 0$$最小特征值对应的特征向量 $v_3$ 就是法向方向。
为什么? 几何直观:协方差矩阵衡量了数据在各个方向上的离散程度。如果点云局部近似一个平面,那么沿平面方向(两个主方向)的方差很大,而垂直于平面的方向方差很小。最小特征值对应最小方差方向,即法向。
完整推导: 法向估计等价于寻找过质心 $\bar{q}$ 的平面 $n^T (x - \bar{q}) = 0$,使得所有邻域点到该平面的平方距离之和最小:
$$\min_{n, \|n\|=1} \sum_{i=1}^k (n^T(q_i - \bar{q}))^2 = \min_{n, \|n\|=1} n^T C n$$由Rayleigh商定理,$n^T C n$ 在 $\|n\|=1$ 约束下的最小值等于 $C$ 的最小特征值 $\lambda_3$,在 $n = v_3$ 时取到。
注意:PCA只给出方向,不给出朝向(inside/outside)。对于封闭物体,通常需要传播法向朝向使其一致(如基于最小生成树的传播)。
点云渲染方式
点云没有面,不能直接光栅化。主要渲染技术:
- Point Splatting(椭球溅射):将每个点渲染为一个小椭盘(通常面向相机),通过混合累积颜色;
- Point Sprite:GPU将每个点扩展为一个正方形billboard,配合深度纹理修正。
在AI生成中的利弊分析:为什么Point-E选择点云作为中间表示?
OpenAI的Point-E选择点云作为生成目标,核心原因是:
- 生成简单:点云没有拓扑约束,生成模型只需预测坐标,无需保证流形性或水密性;
- 与文本-图像模型的兼容性:点云可以视为"很多3D像素",容易适配Transformer或扩散架构;
- 劣势:点云稀疏、无显式表面、难以直接用于渲染和制造。Point-E pipeline的第二阶段正是将点云上采样并转换为网格。
符号距离场(Signed Distance Field, SDF)
严格数学定义
设 $S \subset \mathbb{R}^3$ 是一个封闭曲面,$\Omega_{int}$ 是其内部区域。符号距离场是一个函数 $f: \mathbb{R}^3 \rightarrow \mathbb{R}$,满足:
$$|f(x)| = \inf_{y \in S} \|x - y\|$$且
$$f(x) < 0 \Leftrightarrow x \in \Omega_{int}, \quad f(x) = 0 \Leftrightarrow x \in S, \quad f(x) > 0 \Leftrightarrow x \in \Omega_{ext}$$与占用场(Occupancy Field)的区别
占用场定义为:
$$o(x) = \mathbb{1}_{f(x) < 0} = \begin{cases} 1 & x \in \Omega_{int} \\ 0.5 & x \in S \\ 0 & x \in \Omega_{ext} \end{cases}$$SDF 比占用场包含更多信息:它不仅告诉你在内在外,还告诉你离表面有多远。这个距离信息使得 SDF 支持高效的梯度查询(法向即 $\nabla f / \|\nabla f\|$)和空间操作。
Eikonal方程
真正的SDF(不只是任意隐式函数)满足 Eikonal 方程:
$$\|\nabla f(x)\| = 1, \quad \forall x \in \mathbb{R}^3 \setminus S$$直觉解释:在距离场中,沿任意方向移动时,距离值的变化率(梯度模长)必须恰好为1。如果你沿着最速下降方向(梯度方向)走,每走单位距离,$f$ 的值就变化1。这正是"距离"的定义性质。
数学推导:设 $x \notin S$,$y^* = \arg\min_{y \in S} \|x - y\|$ 是最近表面点。则 $f(x) = \pm \|x - y^*\|$(符号取决于内外)。梯度为:
$$\nabla f(x) = \pm \frac{x - y^*}{\|x - y^*\|}$$其模长显然为1。
SDF的优良性质
SDF 是"可计算的几何",支持一系列解析操作:
布尔运算:
- 并集:$f_{A \cup B}(x) = \min(f_A(x), f_B(x))$
- 交集:$f_{A \cap B}(x) = \max(f_A(x), f_B(x))$
- 差集:$f_{A \setminus B}(x) = \max(f_A(x), -f_B(x))$
偏移(Offset / Dilate-Erode):
$$f_{A+r}(x) = f_A(x) - r$$向内偏移(腐蚀)用 $+r$,向外偏移(膨胀)用 $-r$。
圆滑过渡(Smooth Minimum): 硬min/max会在交集处产生 $C^1$ 不连续。可用 smooth minimum 替代:
$$\text{smin}(a, b, k) = -\frac{1}{k} \log(e^{-ka} + e^{-kb})$$当 $k \to \infty$ 时趋近于 $\min(a,b)$。
DeepSDF的数学框架
DeepSDF 将 SDF 参数化为一个神经网络 $f_\theta(z, x)$,其中 $z \in \mathbb{R}^d$ 是形状潜码,$x \in \mathbb{R}^3$ 是查询点。
训练目标的完整推导:
给定一个训练样本(某物体的SDF采样),设其潜码为 $z_i$,训练数据为该物体表面附近点的SDF值 $\{(x_j, s_j)\}$。损失函数为:
$$\mathcal{L}(\theta, \{z_i\}) = \sum_{i,j} \left| f_\theta(z_i, x_j) - s_j \right| + \lambda \sum_{i,j} \left( \|\nabla_x f_\theta(z_i, x_j)\| - 1 \right)^2$$第一项是SDF值的重构损失(通常用L1,因为SDF对异常值敏感);第二项是 Eikonal 正则化,强制网络学到的函数接近 true distance field。
训练时,潜码 $z_i$ 和参数 $\theta$ 同时通过梯度下降优化。推理时,固定 $\theta$,通过优化 $z$ 来拟合新观测(如部分点云)。
代码级伪代码:
| |
神经辐射场(NeRF)
5D坐标函数的逐分量解释
NeRF 将场景表示为一个连续的5D函数:
$$F_\theta: (x, y, z, \theta, \phi) \rightarrow (r, g, b, \sigma)$$- $(x, y, z)$:空间位置;
- $(\theta, \phi)$:视角方向(通常用3D单位向量 $d$ 表示);
- $\sigma$:体密度(volume density),与视角无关;
- $(r, g, b)$:颜色,与视角相关。
体密度 $\sigma$ 的物理含义
$\sigma(x)$ 是光线穿过位置 $x$ 处的无穷小体积时被"拦截"的概率密度。如果在位置 $x$ 处有一条光线穿过,在微小线段 $\delta t$ 内被拦截的概率为 $\sigma(x) \delta t$。
基于这个定义,可以推导出透射率(transmittance) $T(t)$:光线从 $t_n$ 传播到 $t$ 而不被拦截的概率:
$$T(t) = \exp\left(-\int_{t_n}^t \sigma(r(s)) \, ds\right)$$视角相关颜色 $c(x, d)$ 的必要性
为什么颜色必须依赖视角方向?因为真实世界存在非朗伯表面(non-Lambertian surfaces):
- 光泽金属:反射率随视角剧烈变化(Fresnel效应);
- 半透明物体:次表面散射导致颜色随视角改变;
- 各向异性材质:如拉丝金属、天鹅绒。
如果 $c$ 只依赖 $x$,NeRF 只能表示完美的漫反射(Lambertian)表面,无法重建镜面高光。
与SDF的深层联系
NeRF 的密度场 $\sigma(x)$ 在数学上与 SDF 存在深刻联系。理想情况下,表面应该对应 $\sigma \to \infty$ 的薄层,但NeRF使用"软"密度分布。UNISURF 和 VolSDF 等工作显式建立了这一桥梁:
VolSDF:将密度定义为 SDF 的变换:
$$\sigma(x) = \Psi_\beta(f(x))$$其中 $\Psi_\beta$ 是可学习的密度变换(如sigmoid的缩放版本),$f(x)$ 是 true SDF。这使得表面具有明确的几何定义($f(x)=0$),同时保留了体渲染的可微性。
UNISURF:在训练早期使用大的"模糊"表面(类似NeRF),逐步退火到尖锐的表面(类似SDF),实现了从粗到精的几何学习。
表示转换链的数学细节
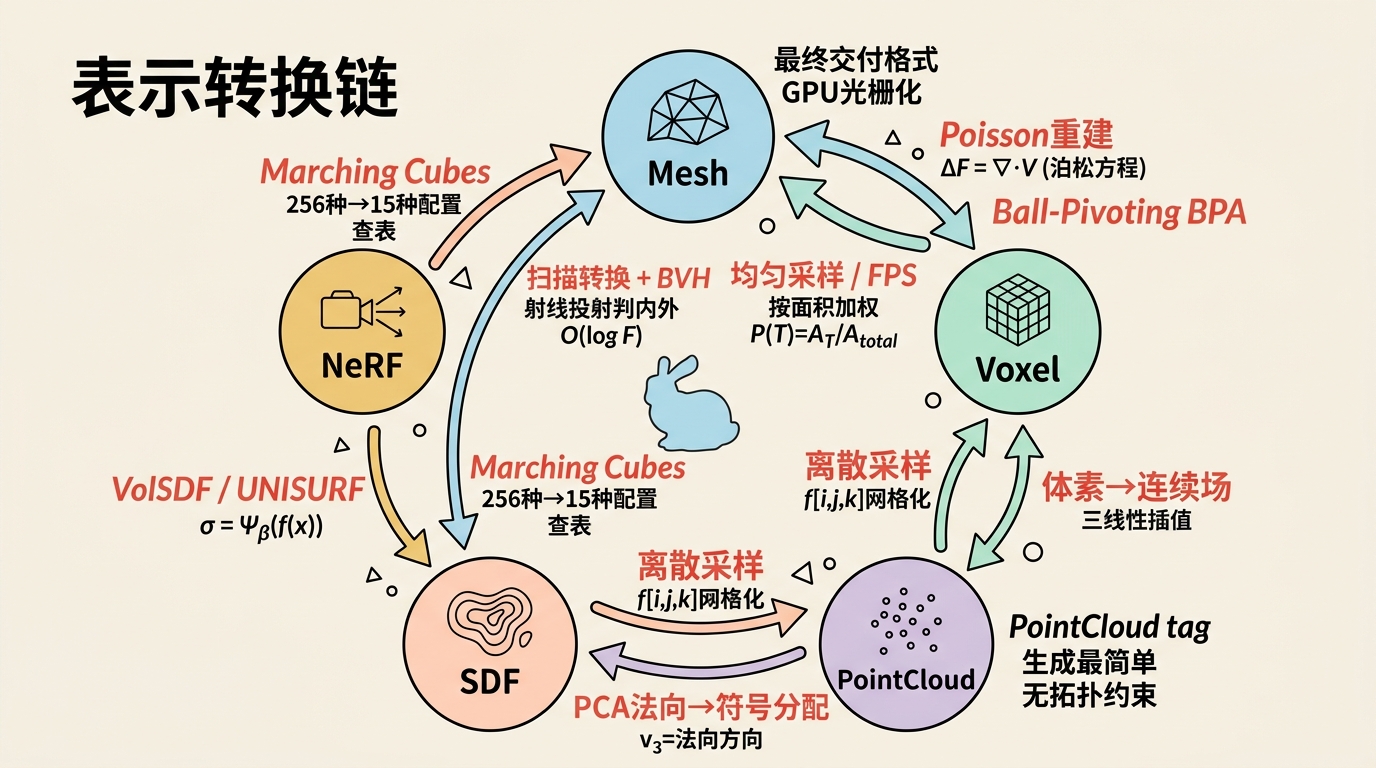
在3D生成pipeline中,不同表示之间的转换是不可避免的。
点云 → 网格
Ball-Pivoting Algorithm (BPA):想象一个半径为 $\rho$ 的球在点云上"滚动"。当球恰好接触三个点且内部无其他点时,这三个点构成一个三角形。BPA 简单快速,但对噪声敏感,且需要合适的 $\rho$ 参数。
Poisson Surface Reconstruction:这是工业界的黄金标准。其核心数学思想是:
- 将点云视为一个指示函数 $\chi: \mathbb{R}^3 \to \{0, 1\}$ 的采样(内部为1,外部为0);
- 点云的法向近似为指示函数的梯度:$n \approx \nabla \chi$;
- 泊松重建求解:找到标量函数 $F$ 使得 $\Delta F = \nabla \cdot \vec{V}$,其中 $\vec{V}$ 是点云定义的法向场;
- 表面提取为 $F = 0.5$ 的等值面。
这本质上是将"离散的、有噪声的法向场"投影到"某个标量函数的梯度场"上,而泊松方程是这个投影的最优解(在最小二乘意义下)。
SDF → 网格:Marching Cubes(概述)
给定一个离散采样的SDF网格 $f[i,j,k]$,Marching Cubes 在每个体素立方体内检查8个顶点的符号。如果符号不一致(有正有负),说明表面穿过该立方体。根据256种可能的符号配置(通过对称性简化为15种),查表确定三角形顶点的位置(通过线性插值找到 $f=0$ 的边交点)。第四部分将详讲。
网格 → 点云
均匀采样:在三角形上按面积加权采样。三角形 $T$ 的面积 $A_T = \frac{1}{2}\|(v_j - v_i) \times (v_k - v_i)\|$。选中概率 $P(T) = A_T / A_{total}$。在三角形内,用重心坐标 $(u, v)$ 生成随机点:$p = v_i + u(v_j - v_i) + v(v_k - v_i)$,其中 $u, v \sim \text{Uniform}$ 且 $u + v \leq 1$。
Farthest Point Sampling (FPS):从随机起点开始,迭代选择距离已选点集最远的点。形式化地,设已选集合为 $S$,则下一采样点为:
$$p^* = \arg\max_{p \in \mathcal{P} \setminus S} \min_{q \in S} \|p - q\|$$FPS 提供了良好的空间覆盖,常用于 PointNet++ 的下采样层。
网格 → SDF
- 扫描转换(Scan Conversion):对网格每个三角形,影响其周围的体素。对每个体素中心查询到三角形的最近距离,并更新符号(通过射线投射判断内外)。
- 加速结构:使用 BVH(Bounding Volume Hierarchy)或 k-d tree 将"点到网格最近距离查询"从 $O(F)$ 降低到 $O(\log F)$。
2.1.2 多视图几何基础
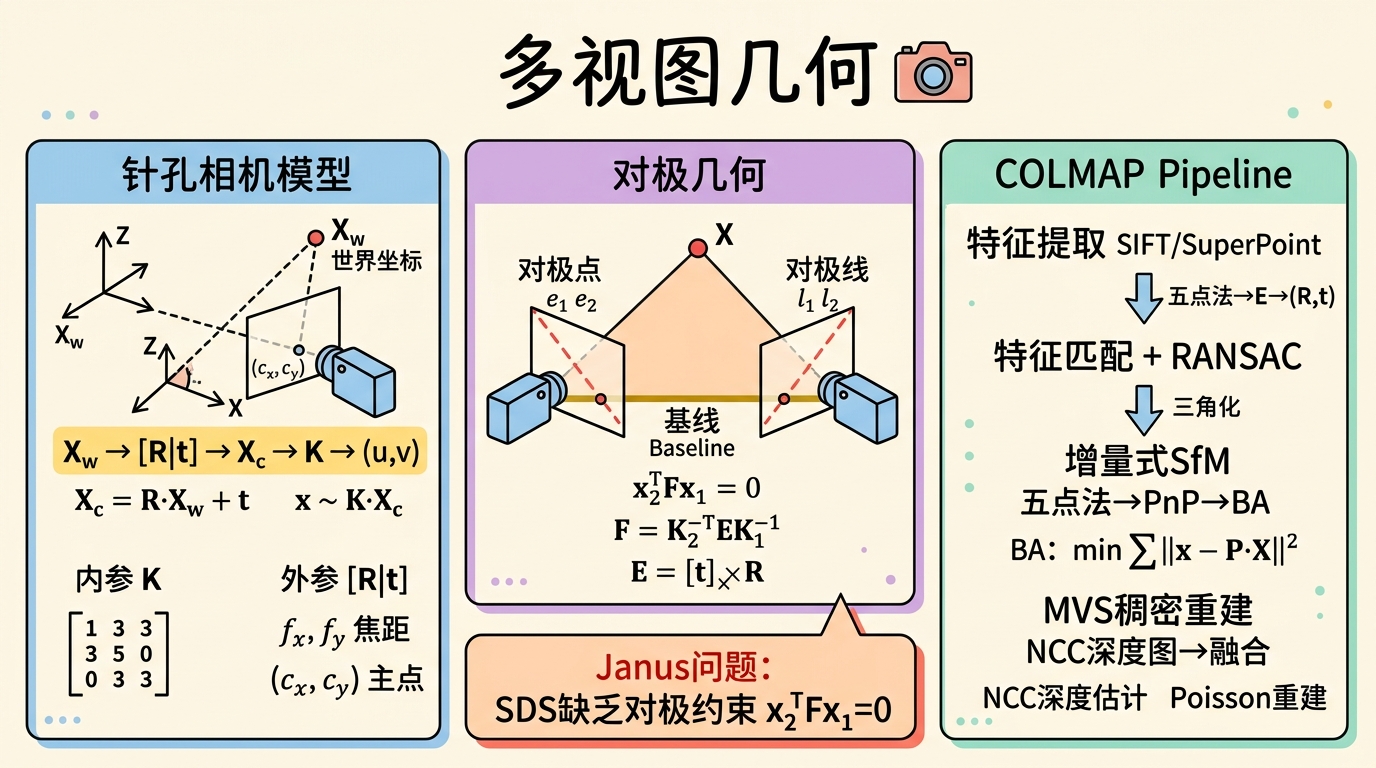
3D生成AI的大量方法(如DreamFusion、Zero-1-to-3、MVDream)都依赖于"从2D图像恢复或约束3D结构"这一核心操作。然而,2D图像与3D场景之间的映射并非任意的——它受制于严格的几何规律,这套规律就是多视图几何(Multi-View Geometry)。本节从最基础的针孔相机模型出发,逐步建立对极几何、SfM/MVS流程的完整理论框架,并深入分析SDS的Janus问题与多视图约束的关系。
针孔相机模型与内参矩阵 $K$
针孔相机将3D世界中的一点 $\mathbf{X}_c = (X_c, Y_c, Z_c)^T$(在相机坐标系下)投影到2D图像平面上的点 $\mathbf{x} = (u, v)^T$,其过程分为两步:
透视投影(3D → 归一化图像平面):$x_n = X_c / Z_c$,$y_n = Y_c / Z_c$——将3D坐标除以深度,将空间点"压扁"到深度为1的平面上。
像素坐标映射(归一化平面 → 像素平面):
$$u = f_x \cdot x_n + c_x, \quad v = f_y \cdot y_n + c_y$$其中 $f_x, f_y$ 是以像素为单位的焦距,$(c_x, c_y)$ 是主点。
内参矩阵 $K$ 的齐次形式:
$$\begin{bmatrix} u \\ v \\ 1 \end{bmatrix} = \frac{1}{Z_c} \underbrace{\begin{bmatrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix}}_{K} \begin{bmatrix} X_c \\ Y_c \\ Z_c \end{bmatrix}$$即 $\mathbf{x} \sim K \mathbf{X}_c$。$K$ 是上三角矩阵,封装了相机的所有内部参数。
畸变模型:实际镜头需引入径向畸变修正:$x_{dist} = x_n(1 + k_1 r^2 + k_2 r^4 + k_3 r^6)$,其中 $r^2 = x_n^2 + y_n^2$。COLMAP在SfM pipeline中联合估计内参和畸变系数。
外参:从世界坐标系到相机坐标系
3D点在世界坐标系与相机坐标系之间通过刚体变换关联:$\mathbf{X}_c = R \mathbf{X}_w + \mathbf{t}$,其中 $R \in SO(3)$,$\mathbf{t} \in \mathbb{R}^3$。
在齐次坐标下,外参写为 $4 \times 4$ 变换矩阵:
$$T_{wc} = \begin{bmatrix} R & \mathbf{t} \\ \mathbf{0}^T & 1 \end{bmatrix}$$完整的投影模型:$\mathbf{x} \sim K[R \mid \mathbf{t}] \mathbf{X}_w = P \mathbf{X}_w$,其中 $P = K[R \mid \mathbf{t}] \in \mathbb{R}^{3 \times 4}$ 是投影矩阵——多视图几何中最重要的单个公式。
对极几何:两视图之间的约束
对极几何告诉我们:如果知道一个3D点在一幅图像中的投影位置,那么该点在另一幅图像中的投影位置被约束在一条直线上——即对极线。
对极几何的几何要素:基线(两相机中心连线)、对极平面(3D点与基线张成的平面)、对极点(基线与图像平面的交点)、对极线(对极平面与图像平面的交线)。
本质矩阵 $E$:当使用归一化坐标 $\hat{\mathbf{x}} = K^{-1}\mathbf{x}$ 时,对极约束为 $\hat{\mathbf{x}}_2^T E \hat{\mathbf{x}}_1 = 0$,$E = [\mathbf{t}]_\times R$,5个自由度。
基础矩阵 $F$:使用原始像素坐标时,$\mathbf{x}_2^T F \mathbf{x}_1 = 0$,$F = K_2^{-T} E K_1^{-1}$,7个自由度。$F$ 独立于场景结构,仅依赖相机的内外参——仅从图像点对应关系就能恢复相机的相对位姿。
八点法(Eight-Point Algorithm)
从至少8对点对应估计 $F$(或 $E$)的经典线性算法:将 $E$ 的9个元素排列为向量,对极约束重写为 $\mathbf{a}^T \mathbf{e} = 0$,$n \geq 8$ 对点堆叠为 $A\mathbf{e} = \mathbf{0}$,求解 $A^T A$ 最小特征值对应的特征向量,再SVD分解强制秩2约束,最后从 $E$ 恢复 $(R, \mathbf{t})$。数据归一化(Hartley归一化)对数值稳定性至关重要。
SfM/MVS流程:COLMAP的完整Pipeline
COLMAP是3D生成AI中最常用的相机位姿估计工具,几乎所有NeRF/3DGS训练数据都依赖它预处理。
阶段一:特征提取 — SIFT/SuperPoint检测关键点并计算描述子。
阶段二:特征匹配 — 顺序匹配 + 词袋验证 + RANSAC几何验证剔除外点。
阶段三:增量式SfM — 选择初始两视图用五点法估计 $E$→分解得到 $(R,\mathbf{t})$→三角化初始3D点→PnP注册新相机→三角化新3D点→Bundle Adjustment联合优化所有相机位姿和3D点位置,最小化重投影误差:
$$\arg\min_{\{R_i, \mathbf{t}_i, X_j\}} \sum_{i,j \in \text{vis}} \|\mathbf{x}_{ij} - K_i[R_i \mid \mathbf{t}_i] X_j\|^2$$阶段四:MVS稠密重建 — 平面扫描+归一化互相关(NCC)估计逐像素深度图→左右一致性滤波→融合稠密点云→可选Poisson重建提取Mesh。
三角化的数学推导
双视图三角化:$X$ 满足 $\mathbf{x}_1 \times (P_1 X) = \mathbf{0}$ 和 $\mathbf{x}_2 \times (P_2 X) = \mathbf{0}$,每个叉积提供2个线性独立约束,两视图共4个约束,堆叠为 $AX = \mathbf{0}$ 用SVD求解。
深度不确定性:$\delta Z \approx \frac{Z^2}{b \cdot f_x} \cdot \delta x$,深度误差与距离平方成正比、与基线成反比——远处物体或窄基线的三角化本质上是不确定的。
Janus问题的对极几何解释
SDS优化3D时,2D扩散模型的分数函数对3D一致性一无所知。对同一3D点在不同视角的投影,2D扩散模型分别施加独立约束 $\log p(\mathbf{x}_1 \mid c)$ 和 $\log p(\mathbf{x}_2 \mid c)$,从不施加对极约束 $\mathbf{x}_2^T F \mathbf{x}_1 = 0$。结果:各视角独立选择各自最可能的外观,而不关心它们是否对应同一3D表面。SDS将多视图几何问题退化为独立的多帧生成问题——扩散模型对"头部正面"的高概率区域是2D图像空间中的吸引子,无论相机在哪个位置,SDS都会将渲染结果拉向这个吸引子。
MVDream:通过多视图训练隐式编码对极约束
MVDream同时输入同一物体的 $M$ 个视角图像及相机位姿(Plücker射线表示 $\mathbf{r}_{ij} = (\mathbf{o}_i + t\mathbf{d}_{ij}) \in \mathbb{R}^6$),3D自注意力允许不同视角的token相互通信。通过大量多视图数据训练,注意力机制学会了"对应点应该长什么样"——对极约束的隐式编码。MVDream证明了用足够多视图数据训练,扩散模型可以隐式学习多视图一致性约束——数据驱动的几何先验,从数据中归纳对极约束。
2.1.3 渲染基础
渲染是连接3D表示与2D图像的桥梁。理解渲染不仅对图形学重要,对3D生成AI也至关重要——因为大多数3D生成模型是通过**渲染损失(rendering loss)**来监督的。
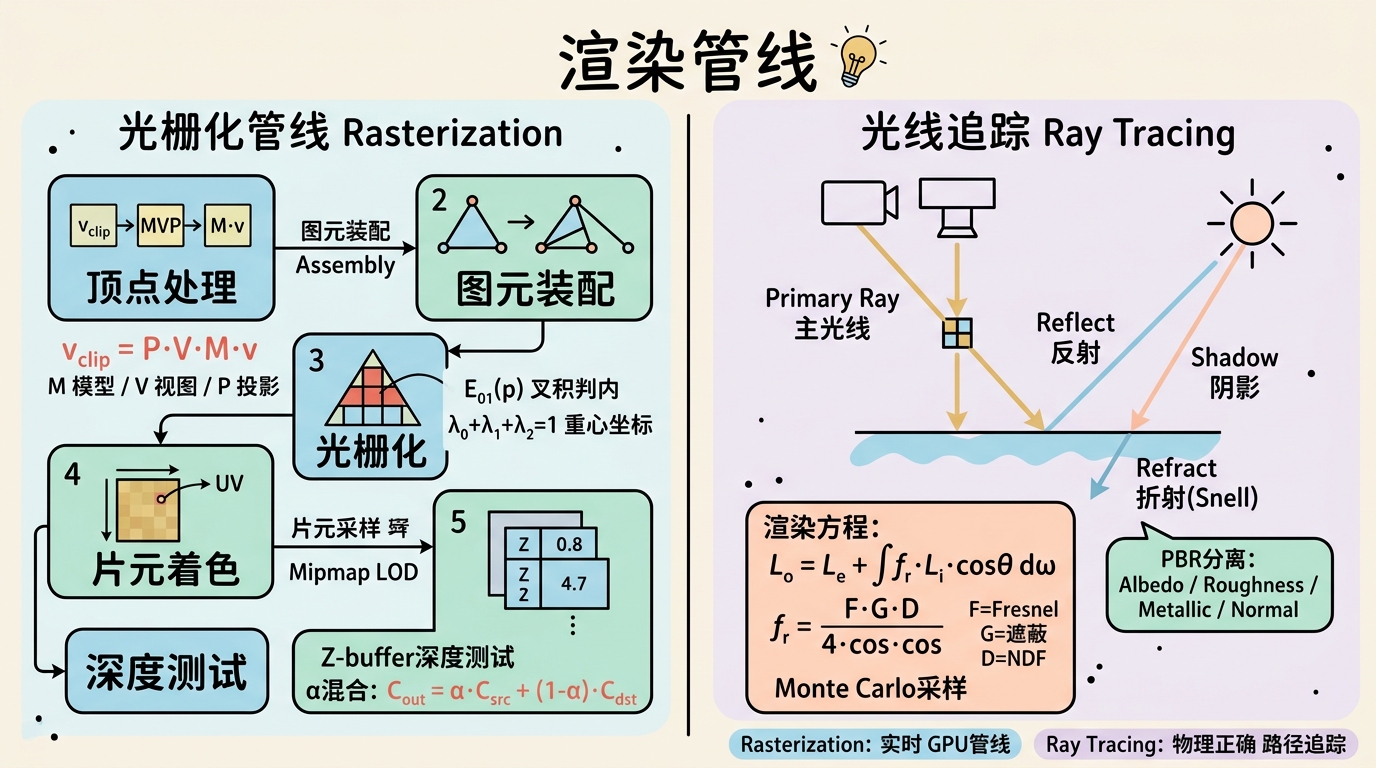
光栅化管线逐步详解
1. 顶点处理
每个顶点 $v$ 依次经过三个变换:
$$v_{clip} = P \cdot V \cdot M \cdot v$$- 模型矩阵 $M$:将顶点从局部坐标(建模空间)变换到世界坐标。包含旋转、平移、缩放。
- 视图矩阵 $V$:将世界坐标变换到相机坐标(以相机为原点,看向 $-Z$)。
- 投影矩阵 $P$:将相机坐标变换到裁剪坐标(clip space)。
- 透视投影: $$P_{persp} = \begin{bmatrix} \frac{1}{\tan(\text{fov}/2) \cdot aspect} & 0 & 0 & 0 \\ 0 & \frac{1}{\tan(\text{fov}/2)} & 0 & 0 \\ 0 & 0 & \frac{f+n}{f-n} & \frac{2fn}{f-n} \\ 0 & 0 & -1 & 0 \end{bmatrix}$$
- 正交投影(略)。
裁剪坐标经过透视除法($v_{ndc} = v_{clip} / w_{clip}$)得到归一化设备坐标(NDC),再映射到屏幕像素坐标。
2. 图元装配与裁剪
GPU 将顶点组装为三角形,并裁剪掉视锥体(frustum)外的部分。裁剪后的三角形可能变为四边形或更多边形,最终被三角化。
3. 光栅化:三角形覆盖测试与重心坐标
光栅化的核心问题是:判断一个像素中心是否在某个三角形内部。
Edge Function 方法:对于三角形顶点 $v_0, v_1, v_2$,定义有向边函数:
$$E_{01}(p) = (p - v_0) \times (v_1 - v_0)$$在2D中,这等价于叉积的z分量。像素 $p$ 在三角形内部,当且仅当 $E_{01}(p), E_{12}(p), E_{20}(p)$ 同号(都非负或都非正,取决于顶点顺序)。
重心坐标插值:三角形内任意点可表示为:
$$p = \lambda_0 v_0 + \lambda_1 v_1 + \lambda_2 v_2, \quad \lambda_i \geq 0, \sum \lambda_i = 1$$其中 $\lambda_i = \frac{E_{jk}(p)}{E_{jk}(v_i)}$(对边面积比)。重心坐标用于插值顶点属性(颜色、法向、UV、深度)。
4. 片元着色与纹理采样
片元(fragment)是"候选像素",携带插值后的属性。纹理采样使用UV坐标 $(u, v)$ 查询纹理图像。
- 双线性过滤(Bilinear Filtering):对 $(u, v)$ 的四个相邻像素做双线性插值,消除块效应;
- Mipmap:预计算纹理的金字塔层级。根据屏幕像素 footprint 的大小选择 LOD(Level of Detail): $$\lambda = \log_2 \left( \max\left( \sqrt{(\frac{\partial u}{\partial x})^2 + (\frac{\partial v}{\partial x})^2}, \sqrt{(\frac{\partial u}{\partial y})^2 + (\frac{\partial v}{\partial y})^2} \right) \right)$$
- 三线性过滤(Trilinear Filtering):在相邻两个mipmap层级间再做一次线性插值。
5. 深度测试与混合
每个片元有一个深度值 $z$(来自重心坐标插值的 $z$ 分量)。深度缓冲(Z-buffer)存储每个像素当前的最小深度。新片元只有 $z < Z_{buffer}[x, y]$ 时才能通过测试并写入颜色缓冲。透明物体需要按深度排序后进行Alpha混合:
$$C_{out} = \alpha \cdot C_{src} + (1 - \alpha) \cdot C_{dst}$$光线追踪概念
Whitted-Style 光线追踪
这是一种递归的光线追踪算法:
- Primary Ray:从相机穿过像素中心发射光线;
- 求交:找到与场景物体的最近交点;
- 着色:在该点发射三类次级光线:
- 反射光线(Reflect Ray):沿镜面反射方向;
- 折射光线(Refract Ray):按Snell定律进入透明介质;
- 阴影光线(Shadow Ray):指向每个光源,判断是否有遮挡。
这种风格的光线追踪能产生完美的反射和折射,但无法处理间接漫反射(color bleeding)。
路径追踪(Path Tracing)与渲染方程
路径追踪基于渲染方程:
$$L_o(x, \omega_o) = L_e(x, \omega_o) + \int_{\Omega} f_r(x, \omega_i, \omega_o) \, L_i(x, \omega_i) \, (\omega_i \cdot n) \, d\omega_i$$逐项直观解释:
- $L_o(x, \omega_o)$:从点 $x$ 沿方向 $\omega_o$ 发出的辐射亮度;
- $L_e(x, \omega_o)$:点 $x$ 自身发射的光(仅对光源非零);
- $f_r$:BRDF(双向反射分布函数),描述入射光如何散射到出射方向;
- $L_i$:从方向 $\omega_i$ 入射到 $x$ 的光;
- $(\omega_i \cdot n)$:入射角的余弦(投影面积因子,Lambert定律);
- $\int d\omega_i$:对所有入射方向积分。
路径追踪用蒙特卡洛积分估计这个积分:随机采样一个入射方向,追踪该方向的光线,递归计算 $L_i$。当光线击中光源时,递归终止(俄罗斯轮盘赌)。
PBR材质参数在渲染方程中的角色
现代实时渲染使用微表面模型(Microfacet Model),其BRDF为:
$$f_r = \frac{F(\omega_o, h) \cdot G(\omega_i, \omega_o, h) \cdot D(h)}{4(\omega_i \cdot n)(\omega_o \cdot n)}$$逐项解释:
$F$ Fresnel 项:描述反射率随视角的变化。Schlick近似:
$$F(\cos\theta) = F_0 + (1 - F_0)(1 - \cos\theta)^5$$其中 $F_0$ 是垂直入射时的反射率。关键直觉:入射角越大(越倾斜),反射越强。这是为什么在湖面近处能看到水底,远处只能看到倒影。
$G$ Geometry 项:描述微表面间的相互遮蔽(shadowing-masking)。当表面非常粗糙时,入射光可能先被其他微表面挡住。常用的GGX模型:
$$G(\omega_i, \omega_o) = \frac{1}{1 + \Lambda(\omega_i)} \cdot \frac{1}{1 + \Lambda(\omega_o)}$$$D$ Normal Distribution Function (NDF):描述表面法向的统计分布。光滑表面法向集中在宏观法向附近($D$ 是尖峰);粗糙表面法向分布广泛($D$ 扁平)。GGX/Trowbridge-Reitz分布:
$$D(h) = \frac{\alpha^2}{\pi((n \cdot h)^2(\alpha^2 - 1) + 1)^2}$$其中 $\alpha = roughness^2$。
为什么AI生成PBR贴图需要分离通道?
如果AI直接生成RGB图像,它只是在模仿特定光照条件下的外观。而分离为:
- Albedo(基础颜色):剥离光照的材质固有颜色;
- Roughness(粗糙度):控制 $D$ 的尖锐程度;
- Metallic(金属度):混合 $F_0$(电介质约0.04,金属用albedo的RGB);
- Normal(法线贴图):在片元级别扰动表面法向,模拟凹凸细节。
这种分离使得生成的材质可以在任意光照下正确渲染,这是游戏/影视资产的标准要求。
2.2 深度学习核心基石
2.2.1 生成模型全家桶(从零推导)
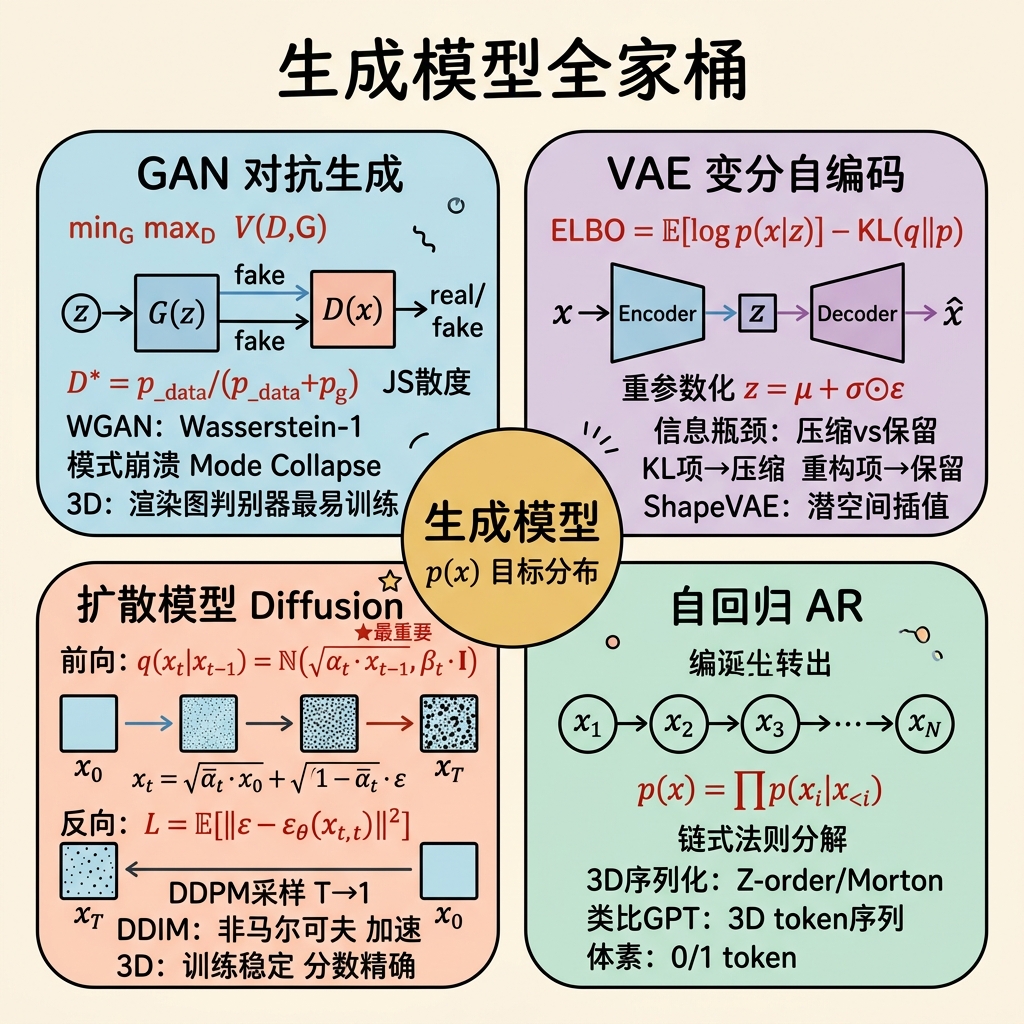
3D生成AI的核心是生成模型。本节从零开始推导四种主流生成范式,重点建立"优化什么"和"为什么这样优化"的数学直觉。
GAN的完整推导
二人零和博弈的数学表述
GAN 由生成器 $G: \mathcal{Z} \to \mathcal{X}$ 和判别器 $D: \mathcal{X} \to [0, 1]$ 组成。$G$ 从先验 $p_z(z)$(通常是标准高斯)采样潜码,生成假样本 $G(z)$;$D$ 判断输入是真实数据(输出1)还是生成数据(输出0)。
价值函数(零和博弈):
$$\min_G \max_D V(D, G) = \mathbb{E}_{x \sim p_{data}}[\log D(x)] + \mathbb{E}_{z \sim p_z}[\log(1 - D(G(z)))]$$最优判别器 $D^*$ 的推导
固定 $G$,求最优 $D$。对任意样本 $x$,$D$ 的目标是最大化:
$$V(D) = \int_x p_{data}(x) \log D(x) \, dx + \int_z p_z(z) \log(1 - D(G(z))) \, dz$$通过变量替换,第二项可写为 $p_g(x)$(生成样本的分布):
$$V(D) = \int_x \left[ p_{data}(x) \log D(x) + p_g(x) \log(1 - D(x)) \right] dx$$被积函数形如 $a \log y + b \log(1-y)$,在 $y \in [0,1]$ 上的最大值在 $y = \frac{a}{a+b}$ 处取到。因此:
$$\boxed{D^*(x) = \frac{p_{data}(x)}{p_{data}(x) + p_g(x)}}$$代入后生成器的损失等价于最小化JS散度
将 $D^*$ 代回价值函数,得到:
$$V(D^*, G) = 2 \cdot JS(p_{data} \| p_g) - 2\log 2$$其中 JS 散度(Jensen-Shannon Divergence)定义为:
$$JS(P \| Q) = \frac{1}{2} KL\left(P \,\middle\| \frac{P+Q}{2}\right) + \frac{1}{2} KL\left(Q \,\middle\| \frac{P+Q}{2}\right)$$因此,原始GAN的生成器等价于最小化 $p_g$ 与 $p_{data}$ 之间的JS散度。
训练不稳定性的根因
梯度消失:当 $D$ 接近最优时,$D^*(x) \approx 1$ 对真实样本,$D^*(x) \approx 0$ 对生成样本。此时生成器的梯度:
$$\nabla_\theta \mathbb{E}_z[\log(1 - D(G_\theta(z)))] \approx \nabla_\theta \mathbb{E}_z[-\log D(G_\theta(z))]$$但在饱和区域($D \approx 0$),sigmoid的梯度趋于0,导致生成器几乎得不到更新。实践中改用非饱和损失:$\min_G -\mathbb{E}_z[\log D(G(z))]$。
模式崩溃(Mode Collapse):如果生成器发现某个区域(mode)能稳定欺骗判别器,它会集中生成该区域的样本,而不探索其他区域。JS散度的离散本质加剧了这个问题——当两个分布支撑集不重叠时,JS散度恒为 $\log 2$,无法提供梯度信号。
WGAN的改进
Wasserstein GAN 用 Earth Mover’s Distance(Wasserstein-1) 替代 JS 散度:
$$W(p_{data}, p_g) = \inf_{\gamma \in \Pi(p_{data}, p_g)} \mathbb{E}_{(x,y) \sim \gamma}[\|x - y\|]$$其中 $\Pi$ 是所有联合分布(耦合)的集合,其边缘分布分别为 $p_{data}$ 和 $p_g$。
根据Kantorovich-Rubinstein对偶性:
$$W(p_{data}, p_g) = \sup_{\|f\|_L \leq 1} \mathbb{E}_{x \sim p_{data}}[f(x)] - \mathbb{E}_{x \sim p_g}[f(x)]$$其中上确界取遍所有1-Lipschitz函数 $f$。WGAN将判别器 $D$ 替换为Critic $f$,并强制 $f$ 满足Lipschitz约束(通过权重裁剪或梯度惩罚)。
在3D中的具体困难
3D GAN需要设计3D判别器。选择包括:
- 体素判别器:3D CNN判断 $32^3$ 体素的真假。问题在于高分辨率计算昂贵,且模式崩溃严重;
- 点云判别器:判断无序点云的真假。PointNet可以作为判别器 backbone;
- 渲染图判别器:将3D表示(体素/点云/NeRF)渲染为2D图像,用2D CNN判断。这是最容易训练的方式,因为2D CNN极为成熟。但问题是:判别器可能只关注纹理而忽略几何一致性(例如,一个3D不一致但每张2D视图都逼真的"幻觉"物体)。
VAE的完整推导
目标:最大化对数似然
我们希望学习一个生成模型 $p_\theta(x)$,使得观测数据的对数似然最大:
$$\max_\theta \sum_i \log p_\theta(x_i)$$但直接计算 $p_\theta(x) = \int p_\theta(x|z) p(z) dz$ 需要积分所有潜码,不可行。
ELBO(Evidence Lower Bound)的推导
引入变分后验 $q_\phi(z|x)$ 来近似真实后验 $p_\theta(z|x)$。考虑对数似然的分解:
$$\log p_\theta(x) = \log \int p_\theta(x|z) p(z) dz$$乘以 $q_\phi(z|x)/q_\phi(z|x)$ 并应用Jensen不等式:
$$\log p_\theta(x) = \log \mathbb{E}_{q_\phi(z|x)}\left[ \frac{p_\theta(x|z) p(z)}{q_\phi(z|x)} \right] \geq \mathbb{E}_{q_\phi(z|x)}\left[ \log \frac{p_\theta(x|z) p(z)}{q_\phi(z|x)} \right]$$展开得:
$$\log p_\theta(x) \geq \mathbb{E}_{q_\phi(z|x)}[\log p_\theta(x|z)] - D_{KL}(q_\phi(z|x) \| p(z)) = \mathcal{L}_{ELBO}$$这就是 ELBO。VAE 的目标是最大化 ELBO。两项分别为:
- 重构项:$\mathbb{E}_{q}[\log p_\theta(x|z)]$ —— 潜码 $z$ 必须保留足够信息来重构 $x$;
- KL项:$D_{KL}(q_\phi(z|x) \| p(z))$ —— 后验 $q_\phi(z|x)$ 必须接近先验 $p(z)$(通常是 $\mathcal{N}(0, I)$)。
重参数化技巧(Reparameterization Trick)
为了通过梯度下降优化 $\phi$,我们需要对 $q_\phi(z|x)$ 采样同时保持梯度流。假设 $q_\phi(z|x) = \mathcal{N}(z; \mu_\phi(x), \sigma_\phi^2(x))$。
直接采样 $z \sim q_\phi$ 是一个随机节点,梯度无法通过它回传。重参数化技巧将随机性外置:
$$z = \mu_\phi(x) + \sigma_\phi(x) \odot \epsilon, \quad \epsilon \sim \mathcal{N}(0, I)$$现在 $z$ 关于 $\phi$ 是确定性的(可微的),随机性只来自 $\epsilon$。期望关于 $q_\phi$ 的梯度变为关于 $\epsilon \sim \mathcal{N}(0,I)$ 的梯度:
$$\nabla_\phi \mathbb{E}_{q_\phi}[f(z)] = \mathbb{E}_\epsilon[\nabla_\phi f(\mu_\phi(x) + \sigma_\phi(x) \odot \epsilon)]$$信息瓶颈的解释
ELBO 是一个信息瓶颈:
- KL项逼迫编码器将信息压缩到与先验一致的潜码中,丢弃冗余信息;
- 重构项逼迫保留对重构 $x$ 至关重要的信息。
最优的 $q_\phi(z|x)$ 在"压缩"与"保留"之间取得平衡。
在3D中的应用:ShapeVAE
ShapeVAE 将3D形状(体素或点云)编码为潜码,解码器重构形状。潜空间具有优良的插值性质:两个形状潜码的线性插值 $z = \lambda z_1 + (1-\lambda)z_2$ 解码为语义上过渡的3D形状。
扩散模型的从零推导(最重要)
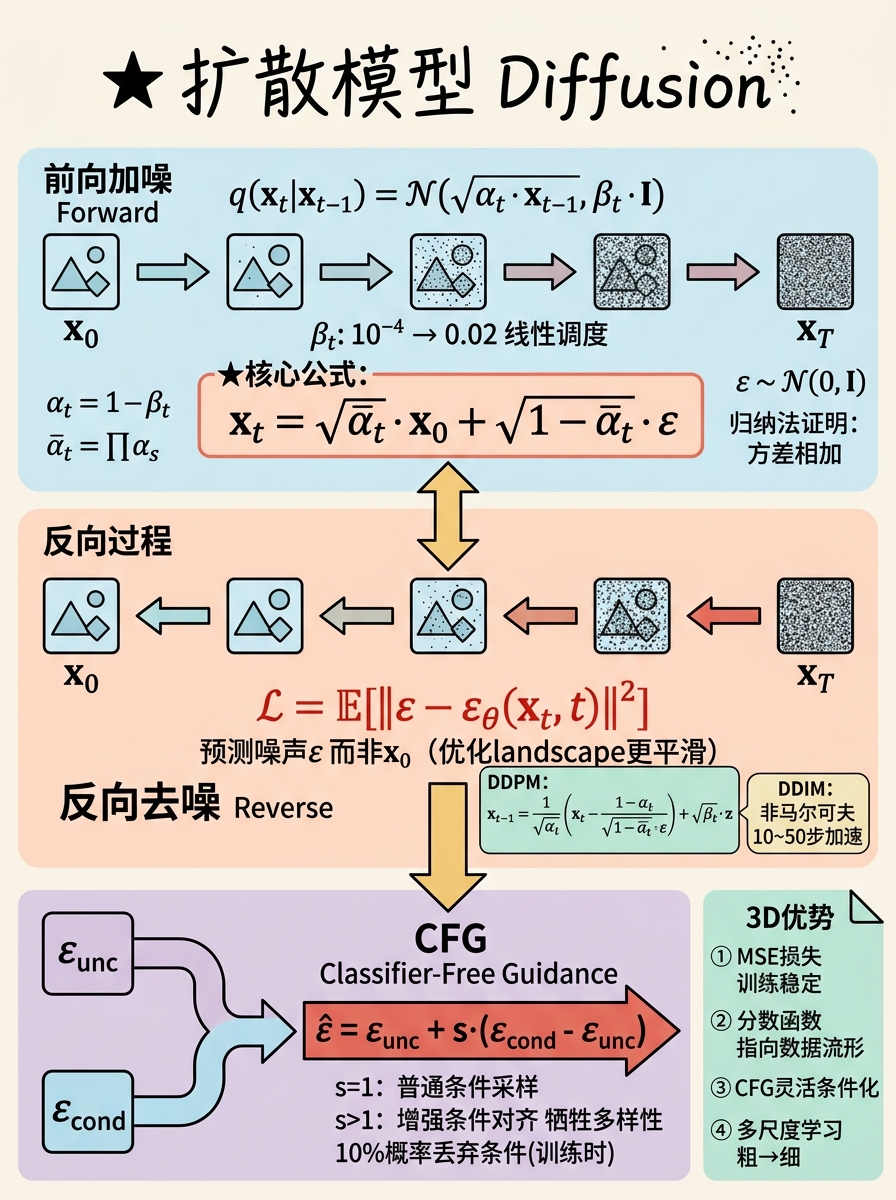
扩散模型是当前3D生成AI的主流范式(Point-E, DreamFusion, Zero-1-to-3等)。其数学之美在于:它通过一个前向加噪过程定义了一个可逆的变换,然后用神经网络学习逆过程。
前向过程(加噪)的数学
设原始数据为 $x_0 \sim q(x_0)$。前向过程通过 $T$ 步逐步添加高斯噪声:
$$q(x_t | x_{t-1}) = \mathcal{N}(x_t; \sqrt{1-\beta_t} x_{t-1}, \beta_t I)$$其中 $\beta_1, \dots, \beta_T$ 是预设的噪声方差调度(通常从 $10^{-4}$ 线性增加到 $0.02$)。
关键推导:从 $x_0$ 直接采样 $x_t$
定义 $\alpha_t = 1 - \beta_t$ 和 $\bar{\alpha}_t = \prod_{s=1}^t \alpha_s$。通过重参数化:
$$x_t = \sqrt{\alpha_t} x_{t-1} + \sqrt{1-\alpha_t} \epsilon_{t-1}$$递归展开:
$$x_t = \sqrt{\bar{\alpha}_t} x_0 + \sqrt{1-\bar{\alpha}_t} \epsilon, \quad \epsilon \sim \mathcal{N}(0, I)$$推导验证(归纳法):
$t=1$:直接由定义成立;
假设对 $t-1$ 成立,则:
$$x_t = \sqrt{\alpha_t} x_{t-1} + \sqrt{1-\alpha_t} \epsilon'$$代入归纳假设:
$$= \sqrt{\alpha_t}(\sqrt{\bar{\alpha}_{t-1}} x_0 + \sqrt{1-\bar{\alpha}_{t-1}} \epsilon) + \sqrt{1-\alpha_t} \epsilon'$$$$= \sqrt{\bar{\alpha}_t} x_0 + \sqrt{\alpha_t(1-\bar{\alpha}_{t-1})} \epsilon + \sqrt{1-\alpha_t} \epsilon'$$两个独立高斯之和的方差为系数平方和:
$$\alpha_t(1-\bar{\alpha}_{t-1}) + (1-\alpha_t) = 1 - \bar{\alpha}_t$$因此:
$$x_t = \sqrt{\bar{\alpha}_t} x_0 + \sqrt{1-\bar{\alpha}_t} \tilde{\epsilon}$$证毕。
这个推导至关重要,因为它意味着我们不需要逐步加噪——可以直接计算任意时刻 $t$ 的带噪样本。
为什么训练目标是预测噪声而非直接预测 $x_0$?
理论上,从 $x_t$ 恢复 $x_0$ 等价于恢复噪声 $\epsilon$,因为:
$$x_0 = \frac{x_t - \sqrt{1-\bar{\alpha}_t} \epsilon}{\sqrt{\bar{\alpha}_t}}$$但 Ho et al. (2020) 发现,预测 $\epsilon$ 的优化 landscape 更平滑,训练更稳定。直观上:噪声 $\epsilon$ 始终是标准高斯,具有稳定的尺度;而 $x_0$ 的尺度随数据分布变化很大。
反向过程与损失函数
反向过程定义为:
$$p_\theta(x_{t-1} | x_t) = \mathcal{N}(x_{t-1}; \mu_\theta(x_t, t), \Sigma_\theta(x_t, t))$$可以证明(通过贝叶斯定理和前向过程的马尔可夫性),真实的反向条件分布 $q(x_{t-1} | x_t, x_0)$ 是高斯分布,其均值依赖于 $x_0$ 和 $x_t$。
由于 $x_0$ 与 $\epsilon$ 一一对应,网络 $\epsilon_\theta(x_t, t)$ 预测噪声等价于预测均值。损失函数简化为:
$$\mathcal{L} = \mathbb{E}_{x_0, t, \epsilon} \left[ \|\epsilon - \epsilon_\theta(\underbrace{\sqrt{\bar{\alpha}_t} x_0 + \sqrt{1-\bar{\alpha}_t} \epsilon}_{x_t}, t)\|^2 \right]$$采样算法(DDPM)伪代码:
| |
**DDIM(去噪扩散隐式模型)**通过将反向过程视为非马尔可夫链,允许用更少的步数(如50步甚至10步)采样,大大加速推理。
Classifier-Free Guidance(CFG)的数学
CFG 是文本到3D生成的关键技术。训练时,以10%的概率将条件 $c$(如文本prompt)替换为空条件 $\emptyset$。推理时:
$$\hat{\epsilon} = \epsilon_{unc} + s \cdot (\epsilon_{cond} - \epsilon_{unc})$$其中:
- $\epsilon_{unc} = \epsilon_\theta(x_t, t, \emptyset)$:无条件预测;
- $\epsilon_{cond} = \epsilon_\theta(x_t, t, c)$:条件预测;
- $s \geq 1$:引导尺度(guidance scale)。
为什么这个线性外推有效?
无条件预测 $\epsilon_{unc}$ 指向"数据分布的一般方向";条件预测 $\epsilon_{cond}$ 额外包含了向条件 $c$ 靠拢的方向。它们的差 $\epsilon_{cond} - \epsilon_{unc}$ 是条件引入的"修正方向"。CFG 沿着这个修正方向走得更远,从而在样本质量(与条件对齐度)和多样性之间 trade-off。$s=1$ 即普通条件采样,$s>1$ 增强条件服从性但可能牺牲多样性。
在3D中的应用:为什么扩散模型比GAN更适合3D?
- 训练稳定:扩散模型的损失是简单的MSE,不需要对抗训练;
- 分数估计精确:扩散模型本质上在学习数据分布的分数函数 $\nabla_x \log p(x)$,这在几何上对应于指向数据流形的方向;
- 易于条件化:通过CFG,可以灵活地注入文本、图像、类别等多种条件;
- 多尺度学习:扩散过程天然地在不同噪声水平下学习,从粗结构到细细节。
自回归模型
链式法则分解
任何联合分布都可以按链式法则分解:
$$p(x) = \prod_{i=1}^N p(x_i | x_1, \dots, x_{i-1}) = \prod_{i=1}^N p(x_i | x_{在3D中的序列化挑战
3D数据是本质上的空间数据,如何展平为序列?
- 体素:按空间顺序(如Z-order/Morton序或光栅扫描序)展平为 token 序列;
- 点云:按生成顺序(如从粗到精,或按FPS顺序)逐个生成点坐标;
- Mesh:将顶点-面关系编码为 token 序列(如 PolyGen 的做法)。
与GPT的类比
将3D tokens 视为"单词",自回归模型学习"下一个token的分布"。例如,在体素生成中,每个token是二值占用(0/1);在点云生成中,每个token可能是量化的坐标值。
2.2.2 神经网络架构
CNN在3D中的扩展
2D卷积:
$$Y[i,j] = \sum_{m=0}^{k-1} \sum_{n=0}^{k-1} X[i+m, j+n] \cdot W[m,n] + b$$3D卷积:
$$Y[i,j,k] = \sum_{m=0}^{k-1} \sum_{n=0}^{k-1} \sum_{l=0}^{k-1} X[i+m, j+n, k+l] \cdot W[m,n,l] + b$$计算复杂度分析:
- 2D:输入 $N \times N$,核 $K \times K$,输出通道 $C_{out}$,复杂度 $O(N^2 \cdot K^2 \cdot C_{in} \cdot C_{out})$;
- 3D:输入 $N \times N \times N$,核 $K \times K \times K$,复杂度 $O(N^3 \cdot K^3 \cdot C_{in} \cdot C_{out})$。
空间和时间都升了一维,使得 $256^3$ 的3D卷积在计算上极为昂贵。
稀疏卷积(Sparse Convolution)
大多数3D体素是空的。稀疏卷积只在被占据的体素上计算:
| |
MinkowskiEngine 是实现稀疏卷积的主流库,它使用哈希表存储体素特征,并实现了GPU加速的稀疏卷积核。
Transformer与自注意力
自注意力的完整公式
给定查询矩阵 $Q$、键矩阵 $K$、值矩阵 $V$(都由输入 $X$ 线性投影得到):
$$\text{Attention}(Q, K, V) = \text{softmax}\left(\frac{QK^T}{\sqrt{d_k}}\right)V$$为什么除以 $\sqrt{d_k}$?
假设 $Q$ 和 $K$ 的每个元素是独立随机变量,均值为0,方差为1。那么 $QK^T$ 的每个元素是 $d_k$ 个独立变量之和,其方差为 $d_k$。因此 $QK^T$ 的元素的方差随 $d_k$ 线性增长。除以 $\sqrt{d_k}$ 将方差归一化为1,防止点积过大导致 softmax 进入饱和区(梯度消失)。
Multi-Head Attention
$$ \text{MultiHead}(Q, K, V) = \text{Concat}(\text{head}_1, \dots, \text{head}_h)W^O $$$$ \text{head}_i = \text{Attention}(QW_i^Q, KW_i^K, VW_i^V) $$直觉:不同的头可以关注不同的子空间和关系模式(如一个头关注局部几何,另一个头关注全局结构)。
在3D中的适配:Point Transformer
将点云视为 token 序列,每个点的特征(如坐标+颜色)经过线性投影得到 token embedding。自注意力计算点与点之间的关联权重:
$$\alpha_{ij} = \frac{\exp\left(\frac{(W_q f_i)^T (W_k f_j)}{\sqrt{d}}\right)}{\sum_{j'} \exp(\cdot)}$$$$\hat{f}_i = \sum_j \alpha_{ij} (W_v f_j)$$这本质上是特征空间中的加权聚合,权重由特征相似度决定。
计算复杂度 $O(N^2)$ 的挑战
对 $N$ 个点的点云,自注意力需要计算 $N \times N$ 的注意力矩阵。当 $N=10^5$ 时,这不可行。解决方案:
- 局部注意力:只计算k-NN邻域内的注意力($O(N \cdot k)$);
- 稀疏注意力:如Strided attention, Window attention;
- 线性注意力:用核技巧近似 softmax,降至 $O(N)$。
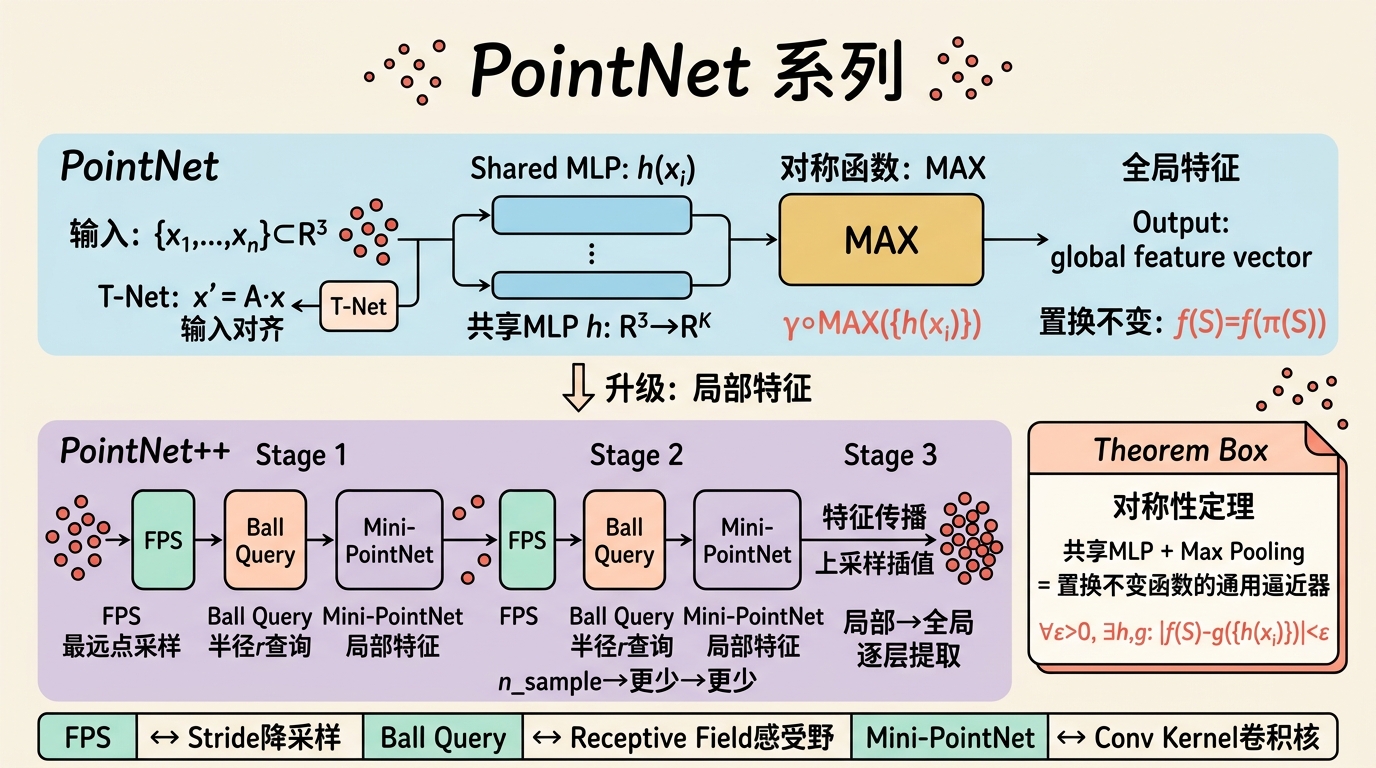
PointNet系列深度解析
PointNet的数学
设点云为 $\{x_1, \dots, x_n\} \subset \mathbb{R}^3$。PointNet 的核心是:
$$f(\{x_1, \dots, x_n\}) = \gamma \circ \text{POOL}(\{h(x_i)\}_{i=1}^n)$$其中:
- $h: \mathbb{R}^3 \to \mathbb{R}^K$ 是共享MLP(每个点独立处理);
- $\text{POOL}$ 是对称函数(max pooling 或 sum pooling);
- $\gamma: \mathbb{R}^K \to \mathbb{R}^{K'}$ 是后续MLP。
对称性定理
PointNet 论文证明了以下关键定理:
定理:对于任何连续的置换不变函数 $f: \mathcal{X}^N \to \mathbb{R}$,和任意 $\epsilon > 0$,存在连续函数 $h$ 和对称函数 $g$,使得对任意点集 $S \in \mathcal{X}^N$:
$$|f(S) - g(\{h(x_i) : x_i \in S\})| < \epsilon$$其中 $g$ 可以选择为 max pooling。
这意味着共享MLP + max pooling 是置换不变函数的通用逼近器,为PointNet的合理性提供了理论保证。
T-Net的作用
T-Net 是一个小型网络(PointNet本身),预测输入点云的 $3 \times 3$ 仿射变换矩阵 $A$:
$$x_i' = A x_i$$这相当于学习一个输入对齐(input alignment),使得网络对刚性变换(旋转、平移)具有不变性或等变性。特征空间变换网络(Feature T-Net)做同样的事,但在特征空间中。
PointNet++的分层架构
PointNet只提取全局特征,无法捕捉局部结构。PointNet++引入分层特征学习:
- 采样层(Sampling):用 FPS 选取关键点 $\{p_{i_1}, \dots, p_{i_m}\}$;
- 分组层(Grouping):以每个关键点为中心,用 ball query 找到局部邻域;
- PointNet层:对每个局部邻域应用 mini-PointNet,提取局部特征;
- 上采样/特征传播:在解码器阶段,将稀疏关键点特征插值回密集点云。
与2D CNN的类比:
- FPS $\leftrightarrow$ Stride(降采样);
- Ball Query $\leftrightarrow$ Receptive Field(感受野);
- Mini-PointNet $\leftrightarrow$ Convolution Kernel(局部特征提取器)。
| |
ConvONet
核心思想
ConvONet(Convolutional Occupancy Network)的核心创新是解耦特征提取分辨率和解码分辨率:
- 编码器:用3D CNN在离散的低分辨率体素网格上提取特征(如 $32^3$);
- 解码器:一个MLP,以连续坐标 $(x,y,z)$ 为输入,查询其在特征网格中的插值特征,预测占用概率。
其中 $\Phi(x)$ 是通过三线性插值从3D特征网格中查询的特征向量,$z$ 是全局潜码。
为什么能处理高分辨率?
特征网格只需要覆盖感兴趣区域的核心结构,分辨率 $32^3$ 足够编码大致形状。而解码器可以在任意分辨率上查询——因为MLP是连续函数。这避免了在高分辨率体素上运行3D CNN的显存灾难。
条件化生成
潜码 $z$ 可以通过多种方式注入:
- 拼接(Concatenation):将 $z$ 与 $\Phi(x)$ 拼接后输入MLP;
- 条件批归一化(Conditional BN):用 $z$ 预测BN的 $\gamma, \beta$;
- 注意力(Attention):用 $z$ 生成查询,与空间特征做交叉注意力。
2.2.3 表征学习:潜空间
信息瓶颈(Information Bottleneck)理论
信息瓶颈的目标是学习表示 $Z$,使得 $Z$ 对预测任务 $Y$ 提供最大信息,同时包含关于输入 $X$ 的最小信息:
$$\min_{p(z|x)} I(X; Z) - \beta I(Z; Y)$$其中 $I(\cdot; \cdot)$ 是互信息,$\beta$ 控制压缩与预测的 trade-off。VAE 的 ELBO 可以看作信息瓶颈的变分近似。
良好潜空间的性质
- 平滑性(Smoothness):如果 $z_1$ 和 $z_2$ 在潜空间中接近,那么解码后的样本 $D(z_1)$ 和 $D(z_2)$ 在数据空间中也接近。这保证了插值有意义。
- 完备性(Completeness):先验分布 $p(z)$ 的支撑集应该覆盖整个数据流形,不应有"空洞"(即不存在对应的解码样本)。
- 可解耦性(Disentanglement):潜空间的各个维度对应独立的语义因子(如一个维度控制高度,另一个控制宽度)。$\beta$-VAE 通过增大KL项的权重来实现更强的解耦: $$\mathcal{L}_{\beta\text{-VAE}} = \mathbb{E}_{q}[\log p(x|z)] - \beta \cdot D_{KL}(q(z|x) \| p(z))$$ 当 $\beta > 1$ 时,KL项的惩罚更重,迫使编码器将信息压缩到更独立的维度中。
在3D生成中的关键作用
在文本到3D生成中,文本条件 $c$ 通常首先被编码到潜空间中的一个方向向量 $v_c$。生成时,从随机潜码 $z$ 出发,沿 $v_c$ 方向移动:
$$z' = z + \alpha \cdot v_c$$这使得语义控制成为可能:通过调整 $\alpha$,可以在保持物体身份的同时改变特定属性。潜空间的良好结构(平滑、完备、可解耦)是这种控制有效的前提。
2.2.4 优化理论与工程基础
3D生成AI的数学优雅之下,是大量的优化理论与工程实践在支撑。本节建立从凸优化到CUDA编程、从梯度下降到分布式训练的完整工程知识图谱。
凸优化基本概念
凸集:集合 $\mathcal{C}$ 是凸集,当且仅当对任意 $\mathbf{x}, \mathbf{y} \in \mathcal{C}$ 和 $\lambda \in [0,1]$:$\lambda \mathbf{x} + (1 - \lambda) \mathbf{y} \in \mathcal{C}$。
凸函数:$f$ 是凸的当且仅当 $f(\mathbf{y}) \geq f(\mathbf{x}) + \nabla f(\mathbf{x})^T (\mathbf{y} - \mathbf{x})$(一阶条件),或 $\nabla^2 f(\mathbf{x}) \succeq 0$(二阶条件)。
强凸性:$f$ 是 $\mu$-强凸的,如果 $\nabla^2 f(\mathbf{x}) \succeq \mu I$。强凸性保证唯一全局最优解,梯度下降以线性速率收敛:$\|x_t - x^*\|^2 \leq \left(\frac{L - \mu}{L + \mu}\right)^{2t} \|x_0 - x^*\|^2$,其中 $\kappa = L/\mu$ 是条件数。
拉格朗日对偶与WGAN的Kantorovich对偶
考虑约束优化 $\min f(\mathbf{x}) \text{ s.t. } g_i(\mathbf{x}) \leq 0$,拉格朗日函数 $\mathcal{L}(\mathbf{x}, \boldsymbol{\lambda}) = f(\mathbf{x}) + \sum \lambda_i g_i(\mathbf{x})$,对偶函数 $d(\boldsymbol{\lambda}) = \inf_{\mathbf{x}} \mathcal{L}$。弱对偶性:$d(\boldsymbol{\lambda}) \leq p^*$;Slater条件下强对偶性成立。
连接WGAN:Wasserstein距离 $W(p_{data}, p_g) = \inf_{\gamma \in \Pi} \mathbb{E}_{(x,y)\sim\gamma}[\|x-y\|]$ 是线性规划问题,其对偶正是Kantorovich-Rubinstein对偶:$W = \sup_{\|f\|_L \leq 1} \{\mathbb{E}_{p_{data}}[f] - \mathbb{E}_{p_g}[f]\}$。WGAN的Critic参数化了这个1-Lipschitz函数,WGAN-GP通过梯度惩罚 $\|\nabla_x f_w(x)\| \approx 1$ 近似Lipschitz约束。WGAN的训练本质上是求解凸优化问题的对偶形式。
变分推断一般框架:ELBO作为特例
变分推断通过 $q_\phi(z)$ 逼近真实后验 $p(z \mid x)$,最小化 $D_{KL}(q_\phi \| p(\cdot \mid x))$。展开得 $\log p(x) = D_{KL}(q_\phi \| p(\cdot \mid x)) + \text{ELBO}$,因此最小化KL等价于最大化ELBO。VAE的ELBO是变分推断在潜变量模型上的特例。
更广义的框架包括:黑箱VI(蒙特卡洛梯度估计)、Normalizing Flow VI(可逆变换增强 $q_\phi$ 表达能力)、SVGD(Stein算子的确定性粒子方法,用于NeRF不确定性估计)。
梯度下降变体:从SGD到AdamW
Adam:维护梯度一阶矩和二阶矩的指数移动平均:
$$\mathbf{m}_t = \beta_1 \mathbf{m}_{t-1} + (1 - \beta_1) \mathbf{g}_t, \quad \mathbf{v}_t = \beta_2 \mathbf{v}_{t-1} + (1 - \beta_2) \mathbf{g}_t^2$$偏差修正后更新:$\theta_{t+1} = \theta_t - \eta \cdot \hat{\mathbf{m}}_t / (\sqrt{\hat{\mathbf{v}}_t} + \epsilon)$。推荐 $\beta_1=0.9, \beta_2=0.999, \epsilon=10^{-8}$。
AdamW:将权重衰减从梯度中解耦,直接作用于参数:$\theta_{t+1} = (1 - \eta\lambda)\theta_t - \eta \hat{\mathbf{m}}_t / (\sqrt{\hat{\mathbf{v}}_t} + \epsilon)$。使权重衰减独立于自适应缩放,当前3D生成AI训练几乎统一使用AdamW,默认 $\lambda = 0.01$。
学习率调度:Cosine Annealing与Warmup
Cosine Annealing:$\eta_t = \eta_{min} + \frac{1}{2}(\eta_0 - \eta_{min})(1 + \cos(\frac{t}{T}\pi))$。训练初期衰减缓慢(探索),中期加速(精调),末期稳定(收敛)。无需手动选择衰减点。
Warmup:前 $T_{warmup}$ 步学习率从0线性增加到 $\eta_0$。解决Adam二阶矩冷启动问题、初始化远离数据流形、BatchNorm统计量未稳定。典型 $T_{warmup}$ 为总步数的5%-10%。
CUDA编程基础:为什么3DGS和Instant-NGP需要CUDA
3DGS的高斯数量动态变化、排序后的tile分配不均匀、Instant-NGP的多分辨率哈希表查询——这些操作无法用标准张量算子高效表达。
线程层级:Thread(最小执行单元)→ Block(共享内存+同步,大小为warp倍数,典型128-1024)→ Grid(所有Block,通过全局内存通信)。
共享内存:每个Block约48-96KB高速缓存,延迟比全局显存低约100倍。3DGS将Tile涉及的高斯参数加载到共享内存后混合计算。
Warp调度与分支发散:一个warp(32线程)锁步执行同一指令。不同线程走向不同分支时必须串行执行——分支发散降低性能。3DGS中不同Tile的高斯数量差异导致严重分支发散。
分布式训练:DDP、FSDP与混合精度
DDP:模型复制到每个GPU,AllReduce同步梯度。瓶颈:每卡必须容纳完整模型。
ZeRO优化器:ZeRO-1(优化器状态分片,内存~4×节省)→ ZeRO-2(+梯度分片,~8×)→ ZeRO-3(+参数分片,~N×,但通信量增加)。FSDP是PyTorch的ZeRO-3实现,引入预取策略将通信与计算重叠。
混合精度训练(AMP):前向FP16/BF16,参数更新FP32。Loss Scaling解决FP16梯度下溢:$\tilde{\mathcal{L}} = s \cdot \mathcal{L}$,缩放因子 $s$ 动态调整。BF16指数位与FP32相同,不需要Loss Scaling,已成为大型模型训练主流。
2.3 先修知识自测清单(扩展版)
本节提供一个覆盖上述所有主题的深度自测清单。如果你能够独立回答其中80%的问题(包括写出关键公式和伪代码),说明你已具备继续深入3D生成AI的坚实基础。
3D表示与数据结构
Q1. 写出一个三角网格的数学定义。什么是流形边?什么是水密网格?
提示:流形边要求恰好被两个面共享;水密=封闭2-流形。
Q2. 半边数据结构中,给定一个顶点 $v$,如何遍历其所有邻接面?时间复杂度是多少?
提示:利用 twin.next 循环,$O(k)$,$k$ 为顶点度。
Q3. 体素与像素的升维类比中,3D邻接关系与2D有何关键差异?
提示:3D有6/18/26-邻接;2D有4/8-邻接。对角连通性在3D更复杂。
Q4. 为什么 $256^3$ 体素对3D U-Net构成显存瓶颈?做粗略计算。
提示:$256^3 \approx 1.6 \times 10^7$;若32通道、float32,仅一层特征图约2GB。
Q5. 点云为什么被定义为"集合"而非"序列"?写出置换不变性的数学表达。
提示:$f(\{x_i\}) = f(\{x_{\pi(i)}\})$ 对任意 $\pi \in S_N$。
Q6. 用PCA估计法向时,为什么最小特征值对应的特征向量是法向?给出完整推导。
提示:最小化 $n^T C n$ 在 $\|n\|=1$ 下,Rayleigh商 $\Rightarrow$ 最小特征值。
Q7. SDF与占用场的本质区别是什么?为什么SDF支持偏移操作而占用场不支持?
提示:SDF编码距离;占用场仅编码内外。$f(x) - r$ 改变等值面位置。
Q8. 写出Eikonal方程并解释其几何意义。
提示:$\|\nabla f\| = 1$;沿梯度方向每走单位距离,函数值变化为1。
Q9. DeepSDF的训练损失包含哪两项?分别起什么作用?
提示:L1重构损失 + Eikonal正则化(强制true distance property)。
Q10. NeRF中为什么颜色必须依赖视角方向?举两个非朗伯表面的例子。
提示:Fresnel效应、次表面散射;如金属、蜡、皮肤。
Q11. 泊松表面重建的数学核心是什么?
提示:求解 $\Delta F = \nabla \cdot \vec{V}$,其中 $\vec{V}$ 是输入法向场。
Q12. Marching Cubes的输入是什么?输出是什么?核心步骤是什么?
提示:离散SDF采样;三角网格;查表确定每个立方体内的三角形拓扑。
渲染基础
Q13. 写出MVP矩阵的分解,并解释每个矩阵的作用。
提示:$M_{mvp} = P \cdot V \cdot M$;模型→世界→相机→裁剪。
Q14. 用Edge Function判断像素是否在三角形内。写出公式。
提示:$E_{01}(p) = (p - v_0) \times (v_1 - v_0)$;三边同号则在内部。
Q15. 什么是Mipmap?LOD如何计算?
提示:预过滤纹理金字塔;$\lambda = \log_2(\max(\|\partial(u,v)/\partial x\|, \|\partial(u,v)/\partial y\|))$。
Q16. 写出渲染方程并解释每一项的物理含义。
提示:$L_o = L_e + \int f_r L_i \cos\theta \, d\omega$;发射、BRDF、入射、余弦、积分。
Q17. Microfacet BRDF中 $F, G, D$ 分别代表什么?
提示:Fresnel反射、几何遮蔽、法向分布。
Q18. 为什么PBR管线要将Albedo/Roughness/Metallic/Normal分离?
提示:物理正确性;任意光照下正确渲染;编辑灵活性。
生成模型
Q19. GAN的最优判别器是什么?写出推导的关键步骤。
提示:$D^* = p_{data} / (p_{data} + p_g)$;被积函数 $a\log y + b\log(1-y)$ 在 $y=a/(a+b)$ 取最大。
Q20. GAN等价于最小化什么散度?WGAN改用什么距离?
提示:JS散度;Wasserstein-1距离(Earth Mover’s Distance)。
Q21. VAE的ELBO如何推导?写出完整的不等式链。
提示:$\log p(x) = \log \mathbb{E}_q[p(x|z)p(z)/q(z|x)] \geq \mathbb{E}_q[\log p(x|z)] - D_{KL}(q\|p)$。
Q22. 重参数化技巧是什么?为什么它使梯度能回传?
提示:$z = \mu + \sigma \odot \epsilon$;随机节点外置,$z$ 对参数可微。
Q23. 写出扩散模型从 $x_0$ 直接采样 $x_t$ 的公式,并证明它。
提示:$x_t = \sqrt{\bar{\alpha}_t} x_0 + \sqrt{1-\bar{\alpha}_t} \epsilon$;递归展开+方差相加。
Q24. 为什么扩散模型训练时预测噪声而非直接预测 $x_0$?
提示:数学等价,但噪声尺度稳定(标准高斯),优化landscape更平滑。
Q25. 写出DDPM的损失函数。
提示:$\mathcal{L} = \mathbb{E}_{x_0,t,\epsilon}[\|\epsilon - \epsilon_\theta(x_t, t)\|^2]$。
Q26. Classifier-Free Guidance的公式是什么?解释 $s > 1$ 的效应。
提示:$\hat{\epsilon} = \epsilon_{unc} + s(\epsilon_{cond} - \epsilon_{unc})$;增强条件对齐,牺牲多样性。
Q27. 自回归模型如何用链式法则分解联合分布?3D数据序列化的主要挑战是什么?
提示:$p(x) = \prod_i p(x_i|x_{
神经网络架构
Q28. 写出2D和3D卷积的数学公式,并比较计算复杂度。
提示:2D是4重求和,3D是6重求和;复杂度从 $O(N^2 K^2)$ 到 $O(N^3 K^3)$。
Q29. 稀疏卷积解决了什么问题?其核心思想是什么?
提示:避免在空体素上做无用计算;只在被占据位置计算并维护哈希表。
Q30. 自注意力中为什么除以 $\sqrt{d_k}$?如果不除会发生什么?
提示:防止点积方差过大导致softmax饱和;梯度消失。
Q31. PointNet的对称性定理说了什么?为什么max pooling是关键?
提示:共享MLP + 任意对称连续函数可以逼近任意连续置换不变函数。
Q32. PointNet++中FPS和Ball Query分别对应2D CNN的什么概念?
提示:FPS $\leftrightarrow$ Stride降采样;Ball Query $\leftrightarrow$ 感受野。
Q33. ConvONet为什么能处理高分辨率?其核心解耦是什么?
提示:特征提取分辨率(如$32^3$)与解码分辨率解耦;连续坐标解码器。
表征学习
Q34. 信息瓶颈的目标函数是什么?VAE的ELBO如何与之联系?
提示:$\min I(X;Z) - \beta I(Z;Y)$;KL项压缩,重构项保留任务信息。
Q35. $\beta$-VAE中增大 $\beta$ 会导致什么结果?
提示:更强的解耦,但可能牺牲重构质量。
Q36. 良好潜空间的三条性质是什么?在文本到3D生成中如何利用潜空间?
提示:平滑性、完备性、可解耦性;文本条件编码为方向向量进行语义控制。
结语
本章我们建立了3D生成AI的两根支柱:3D表示的数学结构与深度学习的优化理论。从多边形网格的半边数据结构,到扩散模型的前向加噪过程;从渲染方程的物理直觉,到Transformer的注意力机制——这些概念不是孤立的知识点,而是构成后续所有3D生成方法的"操作基础"。
在下一部分中,我们将进入"核心篇",看到这些先修知识如何在具体的3D生成模型中组合、变形和突破。如果你在本章的任何推导中感到困惑,建议在此暂停,用纸笔重新推导一遍——因为在核心篇中,这些公式将以更复杂的形式重新出现。